Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный — к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам — принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью — повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в «дергании» серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
История
Системы рулевого управления с гидроусилителем были первыми пользователями сервомеханизмов, обеспечивающих перемещение руля в желаемое положение.
Джеймс Ватт «s паровой двигатель губернатора , как правило , считается первым питанием системы обратной связи. Мельница юте является ранее примером автоматического управления, но так как он не имеет усилителя или коэффициент усиления , он обычно не считается сервомеханизмом.
Первым устройством управления положением с обратной связью был двигатель рулевого управления корабля , который использовался для позиционирования руля больших кораблей в зависимости от положения штурвала корабля.
Джон Макфарлейн Грей был пионером. Его запатентованный дизайн был использован на SS Great Eastern в 1866 году.
Джозеф Фаркот может заслужить не меньшую похвалу за концепцию обратной связи, имея несколько патентов между 1862 и 1868 годами.
Телемотор был изобретен Эндрю Беттсом Брауном около 1872 года , что позволило значительно упростить сложные механизмы между диспетчерской и двигателем. Двигатели с паровым рулевым управлением обладали характеристиками современного сервомеханизма: входом, выходом, сигналом ошибки и средством усиления сигнала ошибки, используемого для отрицательной обратной связи, чтобы довести ошибку до нуля. Механизм реверса мощности Ragonnet представлял собой сервоусилитель общего назначения с воздушным или паровым приводом для линейного движения, запатентованный в 1909 году.
Электрические следящих использовались еще в 1888 году Элиша Грей «s фототелеграф .
Для электрических сервомеханизмов требуется усилитель мощности. Во время Второй мировой войны были разработаны электрические сервомеханизмы управления огнем , в которых в качестве усилителя мощности использовался амплидин . Вакуумные трубчатые усилители были использованы в UNISERVO ленточного накопителя для UNIVAC I компьютера. Королевский флот начал эксперименты с дистанционным управлением мощностью ( ) на HMS Champion в 1928 году и начал использовать RPC для управления прожекторами в начале 1930-х годов. Во время Второй мировой войны RPC использовался для управления артиллерийскими установками и наводчиками орудий.
Современные сервомеханизмы используют твердотельные усилители мощности, обычно построенные на полевых МОП-транзисторах или тиристорных устройствах. Маленькие сервоприводы могут использовать силовые транзисторы .
Считается, что это слово произошло от французского « Le Servomoteur » или «ведомый двигатель», который впервые использовал JJL Farcot в 1868 году для описания гидравлических и паровых двигателей, используемых для управления судном.
В простейших типах сервоприводов используется управление ударами . Более сложные системы управления используют пропорциональное управление, ПИД-регулирование и управление пространством состояний, которые изучаются в современной теории управления .
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
- асинхронные сервоприводы – получаются дешевле, чем с синхронным электродвигателем, могут обеспечить точность даже при низких оборотах выходного вала;
- синхронные – более дорогой вариант, но быстрее разгоняется, что повышает скорость выполнения операций;
- линейные – не используют классических электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
- электромеханический сервопривод – движение обеспечивается электрической машиной и шестеренчатым редуктором;
- гидромеханический серводвигатель – движение осуществляется при помощи поршневого цилиндра, обладают значительно большей скоростью перемещения;
По материалу передаточного механизма:

- полимерные – износоустойчивые и легкие, но плохо переносят большие механические нагрузки;
- металлические – наиболее тяжелый вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки;
- карбоновые – имеют средние характеристики по прочности и износоустойчивости, в сравнении с двумя предыдущими, но имеют более высокую стоимость.
Рис. 4. По материалу шестерней
По типу вала двигателя:

- с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
- с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
- с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорогой вариант.
Рис. 5. По типу вала
Применение сервоприводов
Сегодня они широко используются в самых разных областях:
- в робототехнике и при создании манипуляторов; чтобы управлять ими, в свою очередь, берут аппаратно-программные средства ардуино;
- для реализации системы теплого пола – они помогают автоматически регулировать температуру, понижая или повышая ее по мере необходимости;
- в автомобилестроении – для интеграции с замками, подачи жидкости на печку, переключения скоростей в АКПП;
- в грузовом оборудовании – задают режимы захвата, подъема, транспортировки, опускания и отпускания предметов самого разного веса и габаритов.
Это далеко не все возможные сферы и ниши – данные силовые агрегаты, по сути, актуальны везде, где только требуется точно контролировать движение вала.
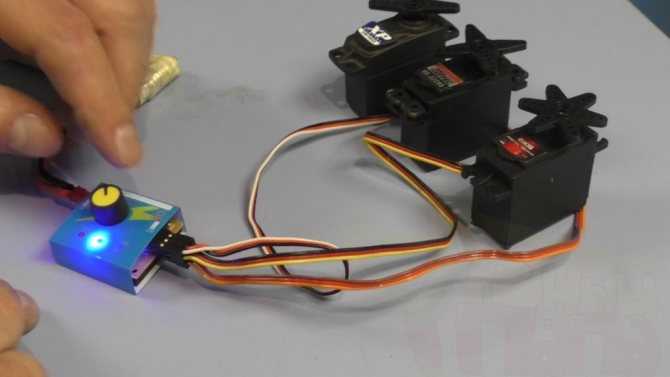
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые — контроллеры.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Как работает сервопривод
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Правила участия в Сервомарафоне:
Марафон по сервоприводам проводится в инстаграме, полезные материалы и задания будут размещаться в статьях в моём канале zen.yandex и на Youtube.
- Для закрепления материала, изложенного в статье вам необходимо решить задачу в конце статьи.
- Если у вас есть ардуино и сервопривод для тестов, то нужно записать короткую демонстрацию работы программы и механизмов, и выложить на своей страничке в инстаграме, с упоминанием @robot_i_ya, @alexyurichk и хештеги ##сервоМарафон #servoMarafon.
- Если нет ардуино, но вы являетесь учеником робоклуба “Робот и Я”, то в чатах групп будут указаны почты. Присланные решения будут выложены отдельным видео, в случае работоспособности кода программы
- Правильно выполнивший наибольшее количество заданий за весь период сервомарафона получит символический приз для усовершенствования своего конструктора HUNA-MRT и создания новых проектов
- В случае равенства лидеров сервомарафона, критериями будут аккуратность кода и первенство выполнения
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.


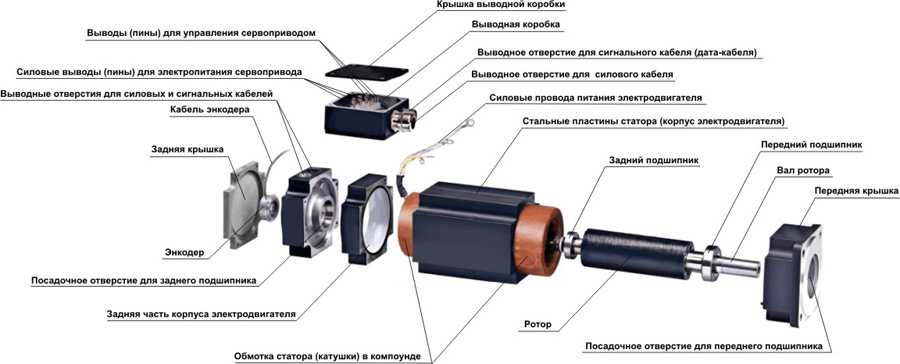
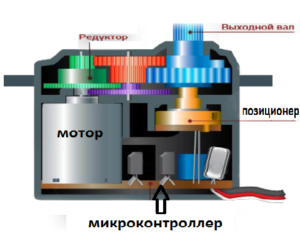
Базовым движущим элементом сервопривода — является электродвигатель (так называемый «сервомотор» или «серводвигатель«). Электродвигатель — это электромеханическое устройство (машина) для преобразования электрической энергии в механическую.
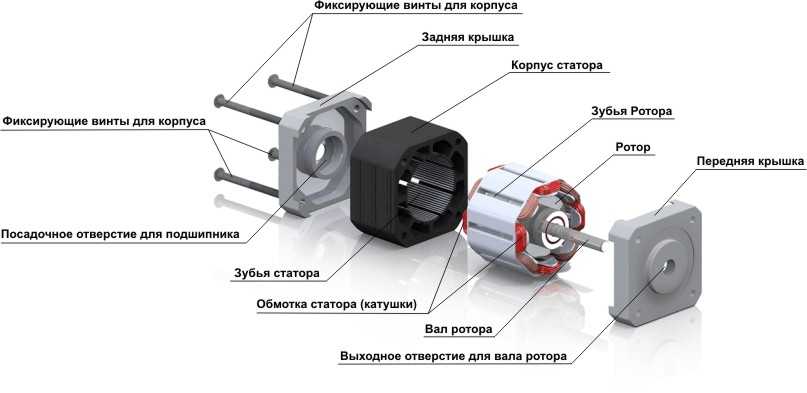
Электродвигатель (или электромотор) состоит из двух основных частей: из статора, часто неподвижной части и из ротора (или якоря) — подвижной вращающейся части. Электродвигатели бывают разных типов и конструкций. Каждый тип электродвигателя имеет свои особенности и, соответственно, эксплуатационные характеристики, которые определяют применение электродвигателя на практике.
Применение сервоприводов
— Шаговые электродвигатели — применяются в основном в бюджетных решениях сервоприводов.
Шаговый двигатель представляет собой бесколлекторное устройство электромеханического типа, имеющее несколько обмоток. На шаговый двигатель подаются короткие электроимпульсы, при помощи драйвера, которые последовательно активируют каждую из обмоток и приводят в движение ротор, вызывая угловые дискретные (или так называемые шаговые) перемещения. От сюда и берется название «шаговый» электродвигатель.
— Синхронные электродвигатели — универсальные сервоприводы для для высокоточных применений и пр.
— Асинхронные электродвигатели — универсальные сервоприводы для насосной и компрессорной техники, подъемных механизмов и пр.
— Линейные электродвигатели — относительно дорогие, сверхточные сервоприводы для скоростного перемещения полезной нагрузки, для высокоточных порталов, прецизионные станки, научное оборудование и пр.
Типы сервоприводов

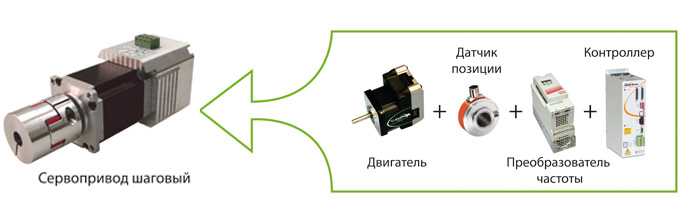
Конструктивно сервопривод СПШ можно разделить на следующие основные блоки:
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.
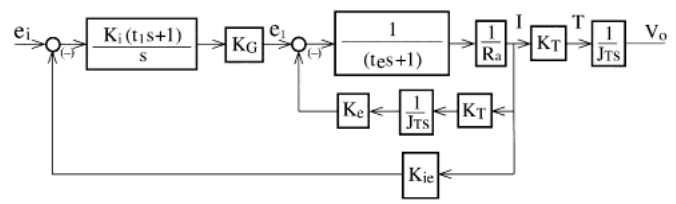
Сервопривод — конструктивные особенности
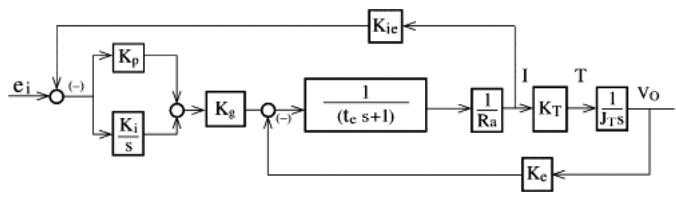
Если блок-схема на рисунке выше не реализуема, следующая болк-диаграмма разделяет серво-петли на внутреннюю и внешнюю:
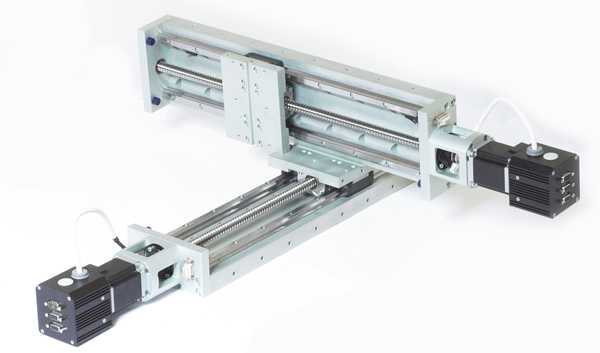
Сервоприводы — в действии

Сервоприводы и сервомоторы для ЧПУ — в Сервотехнике!
Компания «Сервотехника» более 20 лет поставляет серводвигатели (сервомоторы) следующих производителей: асинхронные серводвигатели Fukuta, серводвигатели фирмы KEB (Германия), сервомоторы компании LS Mecapion и сервоприводы Wittenstein. Имеются собственные разработки серводвигателей, производимые внутри России на собственном заводе. Вся продукция сертифицирована и имеет официальную сервисную гарантию
Купить — Сервопривод (серводвигатель)
В Сервотехнике – Вы можете купить комплектные сервоприводы, серводвигатели/сервомоторы, высоконадежные промышленные частотные преобразователи, редукторы и мотор редукторы известных европейских производителей.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами.
Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель.
Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то похожее на потенциометр, вторые — контроллеры.

Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов).
Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана
В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве.
Металлические шестеренки надежнее, но это сказывается на цене и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.





