Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
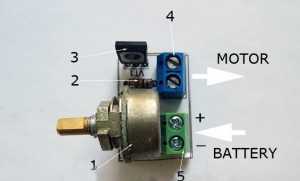
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
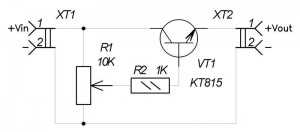 Принципиальная электрическая схема
Принципиальная электрическая схема
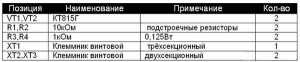
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.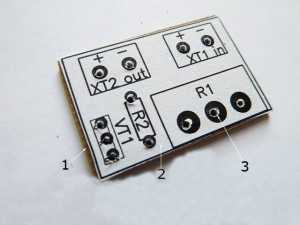
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.


Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).
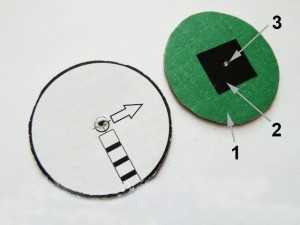
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Шаг 1: Что такое ШИМ
Широтно-импульсная модуляция (ШИМ) сигнала или источника питания включает в себя модуляцию его рабочего цикла, чтобы либо передавать информацию по каналу связи, либо управлять посылаемой мощностью. Самый простой способ генерации сигнала ШИМ требует только пилообразного или треугольного сигнала (легко генерируемого с использованием простого осциллятора) и компаратора.
Когда значение опорного сигнала (зеленый синусоидальной волны на рисунке 2) больше, чем сигнал модуляции (синий), ШИМ сигнал (пурпурный) находится в высоком состоянии, в противном случае она находится в низком состоянии. Но в моем ШИМ я не буду использовать компаратор.
ШИМ-КОНТРОЛЛЕРЫ С ЦИФРОВЫМ УПРАВЛЕНИЕМ ИЗ СЕМЕЙСТВА «FUSION DIGITAL POWER»
Семейство продуктов «Fusion Digital Power» является новой разработкой TI и состоит из двух подсемейств: силовые драйверы (UCD7K) и ШИМ-контроллеры с цифровым управлением (UCD9K). Данная продукция ориентирована на приложения, где необходимы конфигурируемость, коммуникативность, диагностика и адаптивность. К числу таких приложений относятся изолированные и неизолированные преобразователи, от сетевых до локализованных к нагрузке стабилизаторов, а также источники бесперебойного питания, серверное и коммуникационное оборудование.
Семейство UCD9K на данный момент составляют два представителя: однофазный ШИМ-контроллер UCD9111 (см. рис. 4)и двухфазный UCD9112.
Рис. 4. Структурная схема однофазного ШИМ-контроллера с цифровым управлением UCD9111
Отличительные особенности UCD9111/2:
- ШИМ-контроллер понижающего преобразователя с синхронным выпрямлением и цифровым управлением (разрешающая способность 175 пс);
- Цифровой программируемый ПИД-регулятор;
- Диапазон выходного напряжения от 1% до 99% от входного;
- Программируемая частота преобразования до 2 МГц/фазу;
- Программируемое плавное включение и отключение;
- Возможность запуска при предварительных смещенных выходах;
- Встроенный ИОН 800 мВ с начальным разбросом 0,5%;
- Входное напряжение от 4,5 до 15,5 В (UCD7230);
- Дифференциальный усилитель для удаленного контроля;
- Контроль параметров питания через шину PMBus;
- Напряжение питания VDD=3,3 В;
- Интуитивно-понятный графический интерфейс пользователя;
- Встроенный датчик температуры.
UCD9111/2 снабжается графическим интерфейсом пользователя, который по сути представляет собой программу для конфигурации преобразователя и отображения его текущего состояния. Программой поддерживаются команды шины PMBus. С помощью нее пользователь может запрограммировать коэффициенты ПИД-регулятора, установить выходное напряжение, задать частоту преобразования, включить/выключить плавное включение/отключение, выбрать пороги срабатывания защит, записать информацию производителя. В режиме проектирования программа вычисляет параметры внешних компонентов преобразователя.

6-канальная ИМС управления питанием портативных электронных устройств
Компания Texas Instruments представила микросхему TPS65050, ориентированную на управление энергопотреблением процессора КПК, коммуникатора или смартфона. Кроме того, новинка также может быть использована в портативных навигационных системах и мультимедийных проигрывателях и других портативных электронных устройствах.
ИМС TPS65050 включает два понижающих преобразователя для поддержки ядра системы, напряжений питания интерфейсов ввода/вывода, периферийных модулей или памяти. Оба преобразователя работают с входными напряжениями от 2,5 до 6 В, обеспечивают энергосберегающий режим при малом токе нагрузки и спящий режим при токе нагрузки менее 1 мкА. Кроме того, в TPS65050 интегрированы два 400 мА LDO-регулятора и два 200 мА LDO-регулятора со стробируемым внешним вводом. LDO поддерживают входное напряжение от 1,5 до 6,5 В и могут быть запитаны напрямую от батареи или от понижающих преобразователей.
•••
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход. В динистре таких переходов 3.
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
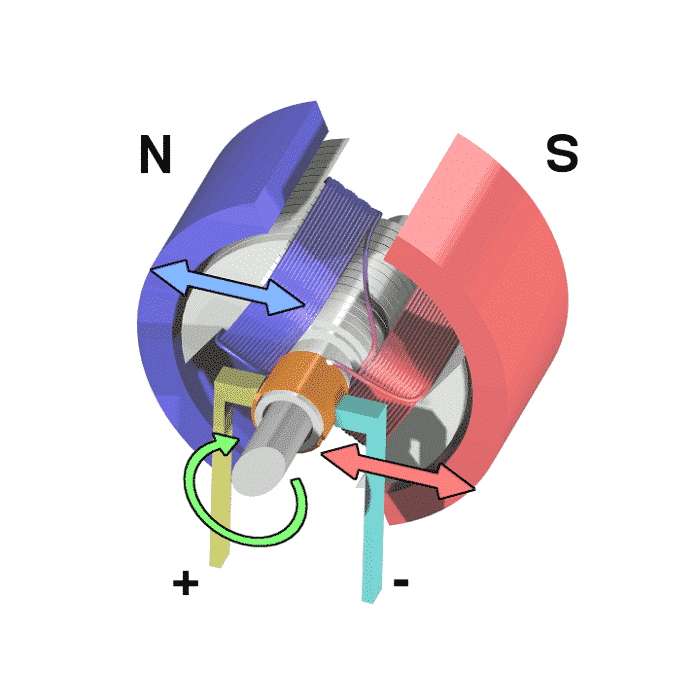
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока. Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
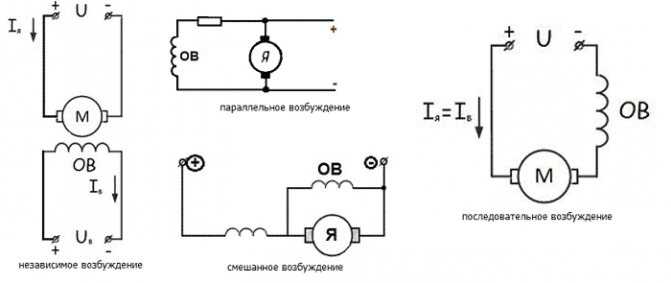
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.

Рисунок 3. Ротор с тремя обмотками
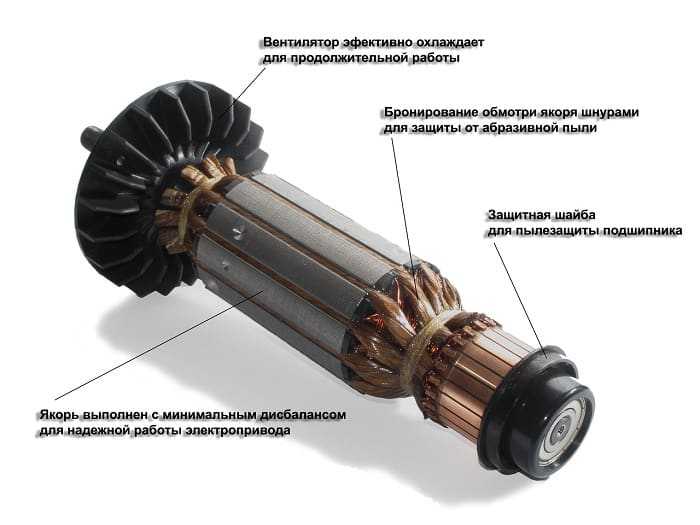
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
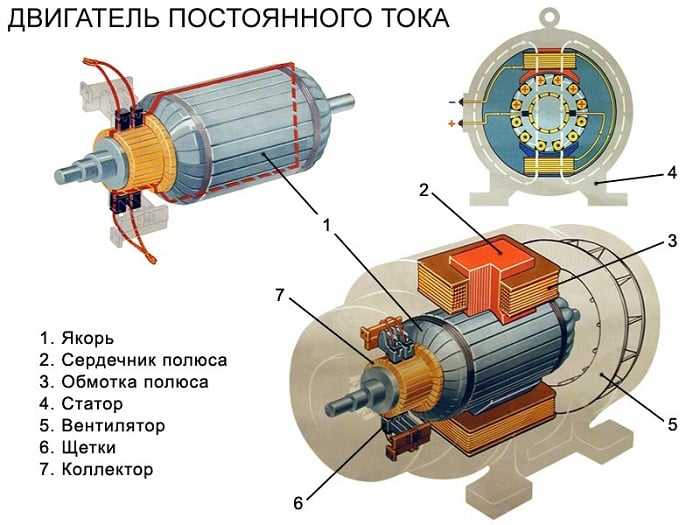
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Контроллер ШИМ для RGB светодиодной ленты
В качестве примера приведу схему ШИМ контроллера для RGB светодиодной ленты на ардуино. В ней используется трёхканальный ШИМ для управления тремя цветами ленты. Ниже будет ссылка на готовое устройство, собранное на этой схеме управления.
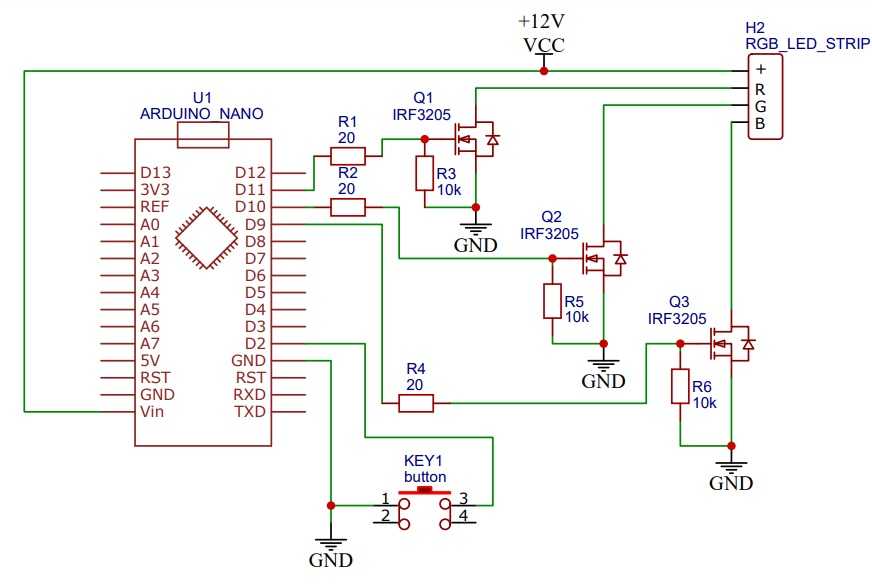
ШИМ контроллер RGB ленты на ардуино
Соединяется всё вот так:
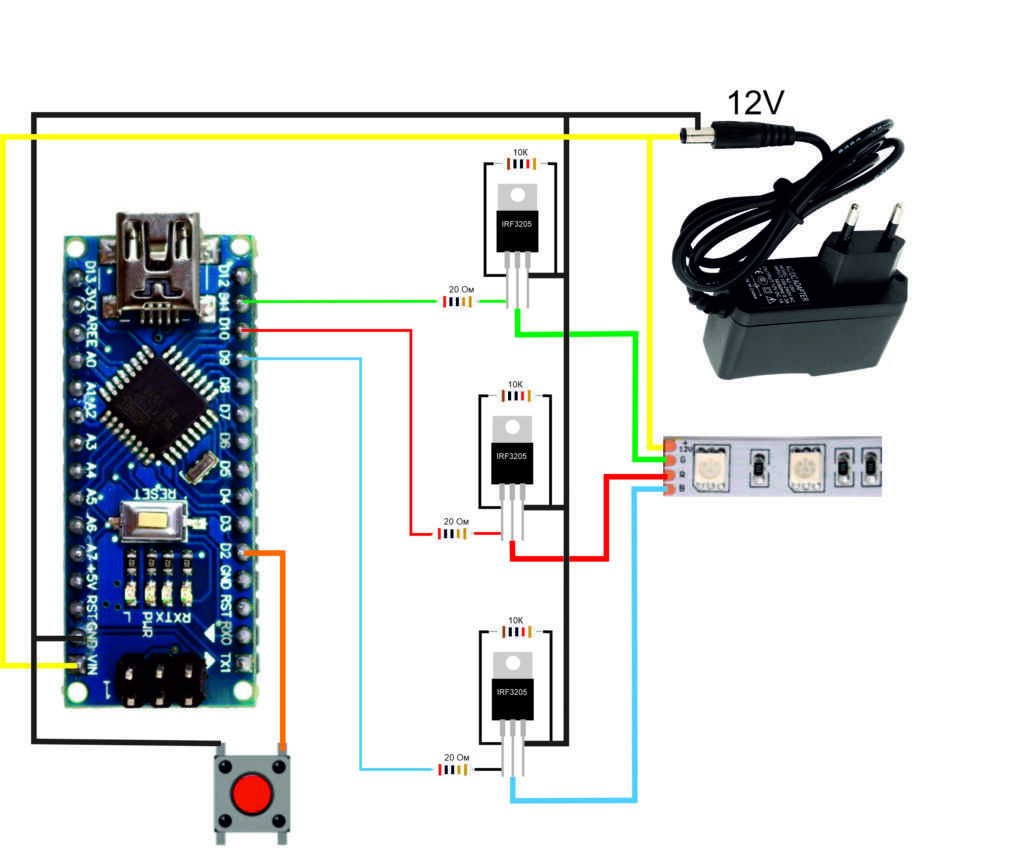
В схеме я добавил ещё кнопку, она нам поможет в будущем переключать цвета и регулировать яркость.
Вот простой код, позволяющий засветить ленту различными цветами. Чтобы изменить цвет подставьте цифры в значения для R, G и B из комментария ниже.
#define outLedRed 9 // пин управления красным цветом
#define outLedGreen 10 // пин управления зелёным цвнтом
#define outLedBlue 11 // пин управления синим цветом
int R = 255;
int G = 255;
int B = 255;
// белый цвет.
// 255, 0, 0 — красный
// 255,65,0 — оранжевый
// 255, 255, 0 — жёлтый
// 153,255,51 — салатовый
// 0, 255, 0 — зелёный
// 0, 255, 255 — аквамарин
// 0, 0, 255 — синий
// 80, 0, 80 — фиолетовый
void setup() {
pinMode(outLedRed,OUTPUT); // опреднляем пин как выход
pinMode(outLedGreen,OUTPUT); // опреднляем пин как выход
pinMode(outLedBlue,OUTPUT); // опреднляем пин как выход
}
void loop() {
analogWrite(outLedRed, R);
analogWrite(outLedGreen, G);
analogWrite(outLedBlue, B);
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
#define outLedRed 9 // пин управления красным цветом intR=255; intG=255; intB=255; // белый цвет. voidsetup(){ pinMode(outLedRed,OUTPUT);// опреднляем пин как выход pinMode(outLedGreen,OUTPUT);// опреднляем пин как выход pinMode(outLedBlue,OUTPUT);// опреднляем пин как выход } voidloop(){ analogWrite(outLedRed,R); analogWrite(outLedGreen,G); analogWrite(outLedBlue,B); |
На всякий случай цоколёвка мосфетов:
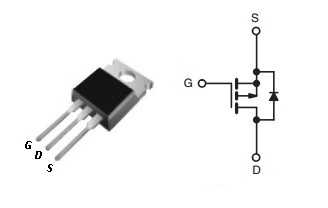
Цоколёвка мосфета
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле:
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:
где:
- Ton — время высокого уровня
- Toff — время низкого уровня
- T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке. Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.
Простой ШИМ регулятор 0-100% для светодиодного светильника на 555 таймере, или модернизация торшера
Для ШИМа я решил взять (в первый раз в своей жизни) универсальную микросхему — NE555. В интернете было найдено достаточно много схем ШИМа, и после сборки одной из них я получил крутилку яркости от 5% до 95%, что не подходило для данной конструкции и методом проб и ошибок, а так-же эмуляции всего этого безумия в Протеусе я достиг результата! Пришлось использовать таймер немножко «наоборот» — выход таймера используется для заряда/разряда конденсатора, а вывод разряда конденсатора использовать как выход.
| Схема ШИМа 0-100% |
Переменный резистор — самое критичное место схемы! Для плавной регулировки необходимо использовать резистор с Логарифмической зависимостью на сопротивление 10k — 100k (можно и другие, но частоту придется подобрать конденсатором).
Во время экспериментов были мысли о использовании вместо таймера контроллера — оцифровывать напряжение с переменника, и выдавать соответствующее заполнение ШИМа, но нас «попустило»)
Небольшой фото отчет с будущей электроникой торшера:
| Вся электроника |
| Светодиоды |
| ШИМ |
Файлы для Proteus — вот (Осторожно! Схема отличается, но это сделано для обеспечения возможности работы в эмуляторе, в реальных условиях схема из статьи — работает)
Сильные и слабые стороны импульсных источников
Если сравнивать аналоговые и импульсные устройства одинаковой мощности, то у последних будут следующие преимущества:
- Небольшие размеры и вес, за счет отсутствия низкочастотного понижающего трансформатора и управляющих элементов, требующих отвода тепла при помощи больших радиаторов. Благодаря применению технологии преобразования высокочастотных сигналов можно уменьшить емкость конденсаторов, используемых в фильтрах, что позволяет устанавливать элементы меньших габаритов.
- Более высокий КПД, поскольку основные потери вызывают только переходные процессы, в то время как в аналоговых схемам много энергии постоянно теряется при электромагнитном преобразовании. Результат говорит сам за себя, увеличение КПД до 95-98%.
- Меньшая стоимость за счет применения мене мощных полупроводниковых элементов.
- Более широкий диапазон входного напряжения. Такой тип оборудования не требователен к частоте и амплитуде, следовательно, допускается подключение к различным по стандарту сетям.
- Наличие надежной защиты от КЗ, превышения нагрузки и других нештатных ситуаций.
К недостаткам импульсной технологии следует отнести:
Наличие ВЧ помех, это является следствием работы высокочастотного преобразователя. Такой фактор требует установки фильтра, подавляющего помехи. К сожалению, его работа не всегда эффективна, что накладывает некоторые ограничения на применение устройств данного типа в высокоточной аппаратуре.
Особые требования к нагрузке, она не должна быть пониженной или повышенной. Как только уровень тока превысит верхний или нижний порог, характеристики напряжения на выходе начнут существенно отличаться от штатных. Как правило, производители (в последнее время даже китайские) предусматривают такие ситуации и устанавливают в свои изделия соответствующую защиту.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
https://youtube.com/watch?v=K5v5DqP4-zI
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT – с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Подведём итог ремонта
По нынешним меркам кризиса и роста цен, кто-нибудь, житель крупных городов, имеющий высокую по российским меркам зарплату, может скажет что сэкономлена не бог весть какая сумма, больше времени своего потрачено было. Но если вернуться к тому, что сейчас на дворе очередной кризис, экономия данной суммы для большинства людей умеющих держать в руках паяльник, проводить диагностику приборов и умеющих считать деньги, вряд ли была бы лишней, пусть даже для сборки своего личного системного блока. А раз так – то люди, имеющие опыт и практические знания в области электроники, уже имеют плюс по сравнению с людьми, которые этих знаний не имеют, а соответственно не имеют и данной возможности. Всем удачных ремонтов, автор статьи AKV.





