Motor Shield L293D: схема, характеристики
Микроконтроллер Ардуино позволяет любому начинающему радиолюбителю изготавливать сложные автоматизированные устройства и проекты. Использование Motor Shield может стать полезным дополнением во в многих проектах на Arduino, так как позволяет подключить сразу 2 сервопривода, 2 шаговых двигателя и до 4 двигателей постоянного тока (с реверсом направления вращения ротора).
Характеристики Мотор Шилд L293D
— для работы нужна библиотека AFMotor.h (скачать библиотеку); — возможность подключения 2-х сервоприводов на 5 Вольт; — возможность подключения 2-х шаговых двигателей от 6 до 12 Вольт; — подключение до 4-х моторов с возможностью реверса направления вращения; — контакты для подключения внешнего питания для двигателей; — Motor Shield for Arduino совместим с платами Uno и Mega.
При подключении серводвигателей и моторов к Ардуино используются различные порты, к которым нельзя подключать другую периферию. Так, для серво используются цифровые порты 9 и 10, для шаговых двигателей и моторов используются порты с 3 по 8 и 12. Если вы желаете еще что-то подключить, то используйте 0 и 1 порт, 2 и 13, а также аналоговые входы (порты A0-A5 можно использовать как цифровые выходы).
ДОКУМЕНТАЦИЯ
Документация
Инициализация
Библиотека поддерживает три типа драйверов:
- DRIVER2WIRE – двухпроводной драйвер (направление + ШИМ)
- DRIVER2WIRE_NO_INVERT – двухпроводной драйвер, в котором при смене направления не нужна инверсия ШИМ
- DRIVER3WIRE – трёхпроводной драйвер (два пина направления + ШИМ)
- RELAY2WIRE – реле в качестве драйвера (два пина направления)
Инициализация происходит следующим образом:
- GMotor motor(DRIVER2WIRE, dig_pin, PWM_pin, level);
- GMotor motor(DRIVER3WIRE, dig_pin_A, dig_pin_B, PWM_pin, level);
- GMotor motor(RELAY2WIRE, dig_pin_A, dig_pin_B, level);
- dig_pin , dig_pin_A , dig_pin_B – любой цифровой пин МК
- PWM_pin – любой ШИМ пин МК
- level – LOW / HIGH – уровень драйвера. Если при увеличении скорости мотор наоборот тормозит – смени уровень
Настройки
- setDeadtime(us) – установка программного deadtime на переключение направления, us в микросекундах. По умолчанию стоит 0: deadtime отключен
- setDirection(dir) – ГЛОБАЛЬНАЯ смена направления вращения мотора например чтобы FORWARD совпадал с направлением движения “вперёд” у машинки. dir – REVERSE или NORMAL (умолч.)
- setLevel(level) – смена уровня драйвера (аналогично при инициализации). Если при увеличении скорости мотор наоборот тормозит – смени уровень. level – LOW или HIGH
- setMinDuty(duty) – минимальный сигнал (по модулю), который будет подан на мотор. Автоматически сжимает диапазон регулирования мотора: например minDuty поставили 50, и при сигнале 1 будет на мотор будет подано
51, максимум останется прежним (диапазон сигнала переведётся в 50.. 255 внутри библиотеки).
Режим работы
У мотора есть 5 режимов работы, устанавливаются при помощи setMode(mode) , где mode:
- FORWARD – вперёд
- BACKWARD – назад
- STOP – холостой (мотор отключен)
- AUTO – отдать управление функции setSpeed()
Управление скоростью и направлением
Скорость устанавливается при помощи функции setSpeed(speed) . Есть два варианта управления скоростью:
- Направление в ручном режиме, скорость 0..255 (0..1023). В этом случае скорость должна быть положительной ( setSpeed(0..255) ), направление вращения задаётся при помощи setMode() . При направлении FORWARD частота оборотов растёт по мере увеличения setSpeed(speed) , при направлении BACKWARD частота оборотов растёт в противоположную сторону по мере увеличения setSpeed(speed) .
- Направление в автоматическом режиме, скорость -255..255 (-1023..1023 для 10 бит). В этом случае устанавливаем setMode(AUTO) и подаём скорость во всём диапазоне. При значении мотор -255 крутится с максимальной скоростью в направлении “назад”, при 255 – в направлении “вперёд”. При значении 0 (ноль) режим автоматически переключается на STOP. Если задан параметр minDuty (при помощи setMinDuty() ), то режим STOP будет автоматически активирован при значении скорости в пределах (-minDuty, minDuty). Пример: у нас есть мотор, экспериментально установлено, что он начинает вращаться при величине скорости больше 50 (и, соответственно, меньше -50), при меньшем значении он просто “пищит” и стоит на месте. Если мы выставим setMinDuty(50) , то в диапазоне -50..50 мотор автоматически будет находиться в режиме STOP и не будет пищать при “шуме” задающего сигнала.
Разрешение ШИМ
setSpeed(speed) может работать с ШИМ любого разрешения, для этого нужно
- Перевести таймер в режим нужного разрешения. 8 битные таймеры можно запустить только на пониженном разрешении, а 16 битный – например на 10 битах (выводы D9 и D10), смотрите пример в библиотеке и урок по частоте ШИМ. По Arduino MEGA пока что такого готового набора у меня нет.
- Настроить нужный объект класса GMotor на нужное разрешение при помощи setResolution(bit) , где bit – разрешение ШИМ в битах (по умолчанию 8). Также не забыть подключить пин драйвера ШИМ к выводу настроенного в первом пункте таймера (смотри пример).
Несколько моторов могут работать на одной плате с разным разрешением, т.е. например 2 мотора на таймере 1 с разрешением 10 бит, и ещё два на таймере 2 с разрешением 8 бит.
Плавное управление скоростью
В библиотеке реализован готовый инструмент для плавного изменения скорости, что может обеспечить плавный пуск и остановку механизмов:
- setSmoothSpeed(acc) – установка скорости изменения скорости (т.е. ускорения) мотора
- smoothTick(speed) – данная функция сама меняет скорость мотора, плавно приближая её к указанной speed . Функция работает по встроенному таймеру на millis() с периодом 50 мс, то есть рекомендуется вызывать smoothTick(speed) не реже, чем каждые 50 мс.
В примере smooth_control можно открыть плоттер и посмотреть, как работает алгоритм.
Назначение элементов и контактов на плате драйвера L298N
Посмотрим внимательнее на модуль и разберемся с его контактами.
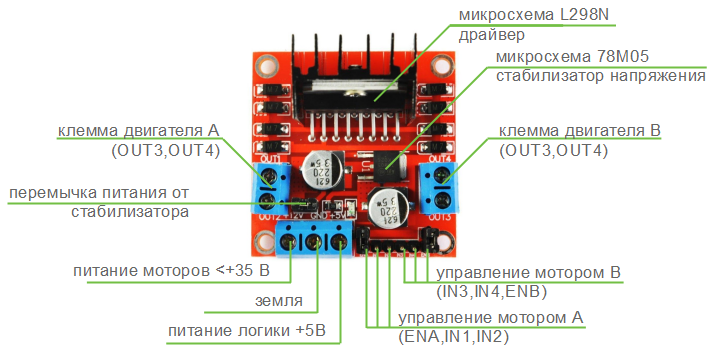
Логика микросхемы L298N питается напряжением 5 Вольт. Для этого на модуле предусмотрен стабилизатор напряжения 78M05. На вход этого стабилизатора можно подавать напряжение до 35 В, а на выходе всегда получается 5 В. Рабочий ток у 78M05 небольшой — до 500 мА. Однако, при желании, от него можно питать и саму плату Ардуино Уно, к которой мы будем подключать драйвер.
Тройная клемма снизу отвечает за питание модуля. Самый левый контакт — питание моторов. Сюда можно подавать до 35 В. Средний контакт — земля, которая должна быть общей для модуля и контроллера. Правый контакт имеет двоякую функцию. Если на модуле стоит перемычка питания стабилизатора, то на этом контакте будет +5В и к нему можно ничего не подключать, либо питать от него контроллер. Но если перемычку убрать, то к этому контакту нужно будет непременно подключить +5В от контроллера, чтобы питать драйвер. В нашем примере мы будем ориентироваться именно на вариант без перемычки.
Две другие винтовые клеммы (OUT1/2 и OUT 3/4) служат для подключения моторов. Надо отметить, что моторы постоянного тока неполярные, но от того на какой контакт мотора подается плюс, а на какой минус, зависит направление их вращения.
Наконец, осталось разобраться с контактами управления. Их по три штуки на каждый мотор. Контакты ENA и ENB позволяют управлять моторами с помощью ШИМ сигнала. Если ENA и ENB подключить строго к +5 В, то моторы будут всегда вращаться с максимальной возможной скоростью. Именно для этого режима на модуле предусмотрены две перемычки рядом с ENA и ENB.
С помощью контактов IN1,IN2,IN3,IN4 задаётся режим работы моторов. Таблица режимов для двигателя A имеет вид:
| Режим | IN1 | IN2 |
| Вращение в одну сторону | 1 | |
| Вращение в обратную сторону | 1 | |
| Блокировка мотора | 1 | 1 |
| Отключение мотора |
Тут следует пояснить последние два режима. Если нам необходимо резко остановить мотор, то выбираем режим блокировки. Для плавной остановки — выбираем «отключение мотора»
Что такое «нанотехнологии»?
Нанотехнологии — это наука, инженерия и технологии, проводимые на наноуровне, что составляет от 1 до 100 нанометров. По сути, эти манипулирование и управление материалами на атомном и молекулярном уровне.
Чтобы вы понимали, давайте представим, что такое нанометр:
- Отношение Земли к детскому кубику — это примерно отношение метра к нанометру.
- Это в миллион раз меньше длины муравья.
- Толщина листа бумаги — примерно 100 000 нанометров.
- Диаметр красной кровяной клетки — 7000—8000 нанометров.
- Диаметр цепочки ДНК — 2,5 нанометра.
Представьте робота, который может манипулировать атомами, как ребенок — кубиками LEGO, выстраивая из базовых атомных строительных блоков что угодно (C, N, H, O, P, Fe, Ni и пр.). Хотя некоторые люди отрицают будущее нанороботов как научную фантастику, вы должны понимать, что каждый из нас жив сегодня благодаря бесчисленным операциям наноботов в триллионах наших клеток. Мы даем им биологические названия вроде «рибосом», но по своей сути они — запрограммированные машины с функцией.
Стоит также провести различие между «мокрыми» или «биологическими» нанотехнологиями, которые используют ДНК и машины жизни для создания уникальных структур из белков или ДНК (в качестве строительного материала) и больше дрекслеровских нанотехнологий, которые включают строительство «ассемблера», или машины, которая занимается 3D-печатью с атомами в наномасштабах для эффективного создания любой термодинамически стабильной структуры.
Давайте рассмотрим несколько типов нанотехнологий, над которыми бьются исследователи.
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Двигатели постоянного тока робота. Драйвер движка L293D и Arduino

Двигатель постоянного тока потребляет очень большой ток. И для того, чтобы управлять им требуются специальные силовые транзисторные ключи. Существуют специальные микросхемы, которые заточены под эту задачу и имя их L293D. А для плат Arduino существует уже готовое решение — плата расширения драйвер двигателя L293D.
Из этой статьи вы узнаете:
Приветствую вас на своих страницах блога, уважаемые читатели. Сегодняшняя статья будет отдельно посвящена этому замечательному драйверу, который играет целевую роль для колёсного робота или для того, чтобы подключить силовые шаговые двигатели, типа NEMA.
Совсем недавно я приобрёл данный драйвер, 2 OLED экрана для Ардуино и датчик для измерения влажности почвы.
Как раз драйвер двигателей на данном этапе является основной частью для изучения, так как я буду его применять в силовой части робота, собран он будет совместно с Arduino UNO. Этот «Бутерброд» будет выполнять основные задачи по движению шасси робота.
Большой плюс в Arduino — это быстродействие, и все операции движения будет выполнять скетч в его «мозгах». Затем я буду снимать всю информацию на Raspberry Pi и обрабатывать её.
Синхронный привод
Данный двигатель содержит ротор, который синхронно вращается с колеблющимся полем или током. Синхронные приводы имеют множество преимуществ перед другими двигателями. В первую очередь это относится к энергетическим показателям. Данные приводы используются в выпускаемых промышленных роботах со средней грузоподъемностью и числом степеней подвижности от 3 до 6. Точность позиционирования электрического привода достигает значений до ± 0,05 мм. Их применяют как в позиционном, так и в контурном режимах работы.
Преимущества:
- Высокая экономичность;
- Удобство сборки и хорошие регулировочные свойства;
- Очевидна целесообразность применения синхронного привода для механизмов, не требующих регулирования скорости.
Недостатки:
- Применение синхронного двигателя затруднено, если механизмы обладают большими маховыми массами, где необходимо иметь регулируемый или двойной привод;
- Не имеет начального пускового момента. Следовательно, для его пуска необходимо разогнать ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
#21. Подключаем к Arduino Шаговый двигатель 28BYJ-48 на драйвере ULN2003
Сегодня в уроке подключим шаговый двигатель 28BYJ-48 к Arduino и научимся вращать вал двигателя в разные стороны и изменять скорость вращения с помощью потенциометра и энкодера KY-040.
Кратко, что такое шаговый двигатель (ШД) — это двигатель, который способен осуществлять вращение на 1 шаг. Шаг — это угол, который обусловлен устройством каждого конкретного шагового двигателя.
Характеристики шагового двигателя 28BYJ-48:
Размера шагового двигателя 28BYJ-48. Необходимы при проектировании деталей для 3D печати.
Вот так выглядит схема шагового двигателя 28BYJ-48
Подавая сигналы в определённом порядке на выводы двигателя, двигатель можно вращать по часовой стрелке.
Для шагового режима.
Для полушагового режима.
https://youtube.com/watch?v=La_AqCDT0wE
Прямое подключение шагового двигателя 28BYJ-48 к Arduino.
В связи с тем, что двигатель 28BYJ-48 работает от 5в и при небольших токах, его можно подключить на прямую к Arduino.
Схема подключения к Arduino UNO будет следующая.
Для вращения ШД достаточно подавать сигналы по схеме, которую мы рассмотрели выше.
Для этого можно сделать массив подачи сигнала на пины микроконтроллера.
И в цикле выполнять каждую строчку массива. Но есть решение с более компактным кодом. Нашел я данный пример на канале Дмитрия Осипова. За что ему отельное спасибо!
Код для вращения в одну и в другую сторону будет вот таким.
ВНИМАНИЕ! Материалы для скачивания находятся внизу статьи!
Пример подключения шагового двигателя 28BYJ-48 (5V)с использованием драйвер ULN2003.
Также у Дмитрия Осипова есть код для изменения скорости вращения с помощью потенциометра. Я его немного доработал, сделал обработку нажатия кнопки без задержки в 500 мс. Сейчас двигатель стал вращаться в обратную сторону без видимой задержки.
Для подключения буду использовать модуль SBT0811 на драйвере ULN2003.
Драйвер устроен вот таким образом.
Соответственно, наш код будет работать и с данным драйвером.
Подключим все по схеме и загрузим код в Arduino NANO.
Схема подключения для Arduino UNO будет аналогичной.
Как видим, двигатель без проблем вращается по часовой стрелке и против часовой, при нажатии на кнопку вращается в противоположном направлении. При вращении потенциометра в одну сторону — скорость уменьшается, при вращении в противоположном направлении скорость увеличивается.
ВНИМАНИЕ! Материалы для скачивания находятся внизу статьи!
Пример управления шаговым двигателем 28BYJ-48 с помощью Энкодера.
Для уменьшения количества элементов в схеме решил заменить потенциометр и тактовую кнопку на энкодер вращения KY-040. Как подключить энкодер вращения к Arduino рассказывал в предыдущем уроке.
Подключаем шаговый двигатель 28BYJ-48 и энкодер к Arduino по схеме.
Проводим небольшую доработку кода и получим вот такой результат.
Если нажать на энкодер, меняется направление вращения. А при вращении энкодера по часовой стрелке — скорость увеличивается. Если вращать против часовой стрелки — скорость снижается.
ВНИМАНИЕ! Материалы для скачивания находятся внизу статьи!
Вы также можете без проблем воспользоваться примером из стандартной библиотеки Stepper, которая позволит сделать тоже самое и при меньшем объёме кода. Но библиотека не даст вам понять, как это все устроено.
А вот сам пример вращения в одну сторону, а затем в другую с использованием библиотеки Stepper.
На основе данного примера можно реализовать управление не только одним шаговым двигателем, а несколькими. Причем, каждый двигатель будет выполнять свои действия не зависимо от других. В планах сделать пару проектов с использованием данного шагового двигателя.
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока.
И до встречи в следующем уроке
Типы сервисных роботов
В соответствии с классификацией Международной федерацией робототехники (International Federation of Robotics — IFR) сервисная робототехника делится на два типа:
-
Персональные. Используются в нашей повседневной жизни:
- Роботы-пылесосы.
- Кухонные роботы.
- Роботы-сиделки.
- Роботы-питомцы.
- Секс-роботы.
-
Профессиональные. Используются для извлечения выгоды при оказании различных услуг:
- Роботы-консультанты.
- Роботы-гиды.
- Роботы-администраторы.
- Роботы-курьеры.
- Роботы-диагносты.
Если для разных персональных задач требуются разные модели роботов, то под несколько профессиональных задач можно запрограммировать одну и ту же модель. Например, Promobot V.4 работает в МФЦ Челябинска, полицейским в Дубае, экскурсоводом в Москве и ещё во многих местах под разными должностями. На робота можно устанавливать разные дополнительные устройства: принтер, сканер для документов, банковский терминал и другие. Это помогает ему работать в разных сферах.
Терминология
- Говоря простым языком, робот (от чеш. robota, подневольный труд) — это кибернетическая система, которая может выполнять операции, относящиеся к физической и умственной деятельности человека. Робот включает в себя программируемую систему управления, которая контролирует механическую конструкцию, а также связывает робота с внешней средой (оборудованием и пользователем).
- Более точное определение робота и связанных с ним понятий дается в стандартах ГОСТ Р ИСО 8373-2014 «Роботы и робототехнические устройства. Термины и определения» и в соответствующем международном стандарте ISO 8373:2012 «Robots and robotic devices — Vocabulary» : «Робот — приводной механизм, который можно запрограммировать по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий задачи по предназначению», где «автономность — способность выполнять задачи по предназначению, основанная на текущем состоянии изделия и особенностях считывания данных без вмешательства человека».
- Наконец, в более широком понимании современный робот — механизм, выполняющий запрограммированные действия, который воспринимает окружающий мир с помощью сенсоров (датчиков, микрофонов, камер), строит модели поведения, чтобы выполнять определенную программу, и способен воздействовать на физический мир тем или иным способом.
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух.
Двигатели постоянного тока: В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определённый угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как угол, на который был сделан поворот, заведомо известен контроллеру; поэтому такие двигатели часто используются в приводах многих роботов и станках с ЧПУ.
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы весьма оригинален: крошечные пьезоэлектри
ческие ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.
Электроактивные полимеры: Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Впрочем, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все ныне существующие их образцы неэффективны или непрочны.
Эластичные нанотрубки: Это — многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменён проводом из такого материала диаметром 8 мм. Подобные компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Продолжение поиска: словари и мнения
Может быть, поискать альтернативные источники, которые сразу нам всё в корне разъяснят?
Если мы посмотрим на определения термина «робот» в различных словарях, то встретим что-то подобное:
Обобщая, выделим те общие понятия, которыми, применительно к роботам, оперируют во всевозможных комбинациях приведенные цитаты:
- робот — это машина;
- антропоморфность, т.е. сходство с человеком — внешнее и/или по выполняемым действиям — с целью замены человека (или иногда и животного?);
- автономность: в диапазоне от полностью автоматического функционирования до всего лишь выполнения сложных последовательностей автоматических действий, а может быть, даже и до дистанционного управления (непосредственно вручную);
- уровень организации программного управления: от выполнения операций по чётко ограниченной заранее заложенной программе до возможности самообучения (а, там же ещё что-то говорилось и про ручное дистанционное управление);
- ещё вот: робот — это то, что придумано писателем Карелом Чапеком… Ой, пожалуй, это не надо.
Фрагмент спектакля по пьесе К. Чапека «R.U.R.» («Россумские универсальные роботы»)
М-да-а-а. Похоже, единственное, в чем полностью сходятся все определения, так это в том, что робот — это машина, т.е. «устройство, выполняющее механические движения с целью преобразования энергии, материалов или информации» .
Но подождите. Дадим слово представителю робототехников новой формации — Дмитрию Гришину, основателю инвестиционного фонда Grishin Robotics:
Вот так вот! Дмитрий максимально широко трактует понятие «робот» и относит к роботам и банкоматы, и автомобильные навигаторы, и даже «умные» часы и «умные» камеры!
А если мы вспомним, что многие современные молодые люди, в массе своей больше знакомые с IT, чем с производством, повседневно называют роботами отдельный вид компьютерных программ…
… то, видимо, мы никогда не разберемся, что такое роботы!
Основные сферы применения нано- и микромашин
Возможности применения таких нано- и микромашин практически безграничны. Например:
- Лечение рака. Выявлять и уничтожать раковые клетки более точно и эффективно.
- Механизм доставки лекарств. Строить механизмы целевой доставки лекарств для контроля и предотвращения заболеваний.
- Медицинская визуализация. Создание наночастиц, которые собираются в определенных тканях и затем сканируют тело в процессе магнитно-резонансной томографии — это могло бы выявить такие проблемы, как диабет.
- Новые устройства зондирования. С практически безграничными возможностями настраивать зондирующие и сканирующие характеристики нанороботов, мы могли бы открыть для себя наши тела и более эффективно измерять мир вокруг нас.
- Устройства хранения информации. Биоинженер и генетик из Гарвардского института Висса успешно сохранил 5,5 петабит данных — около 700 терабайтов — в одном грамме ДНК, превзойдя предыдущий рекорд плотности данных в ДНК в тысячу раз.
- Новые энергетические системы. Нанороботы могут сыграть определенную роль в разработке более эффективной системы использования возобновляемых источников энергии. Или они могли бы сделать наши современные машины более энергоэффективными таким образом, что те будут нуждаться в меньшем количестве энергии для работы с прежней эффективностью.
- Сверхпрочные метаматериалы. В области метаматериалов проводится много исследований. Группа из Калифорнийского технологического института разработала новый тип материала, состоящего из наноразмерных распорок, подобных распоркам Эйфелевой башни, который стал одним из самых прочных и легковесных в истории.
- Умные окна и стены. Электрохромные устройства, которые динамически меняют цвет при приложении потенциала, широко изучаются для использования в энергоэффективных умных окнах — которые могли бы поддерживать внутреннюю температуру комнаты, самоочищаться и многое другое.
- Микрогубки для очищения океанов. Губка из углеродных нанотрубок, способная всасывать загрязняющие воду вещества, вроде удобрений, пестицидов и фармацевтических препаратов, в три раза эффективнее предыдущих вариантов.
- Репликаторы. Известные также как «молекулярные ассемблеры», эти предлагаемые устройства могут осуществлять химические реакции путем расположения реактивных молекул с атомной точностью.
- Датчики здоровья. Эти датчики могли бы наблюдать за химией нашей крови, уведомляя нас обо всем происходящем, обнаруживать вредную еду или воспаления в теле и так далее.
- Подключение наших мозгов к Интернету. Рэй Курцвейл считает, что нанороботы позволят нам подключить нашу биологическую нервную систему к облаку в 2030 году.
Как видите, это только начало. Возможности практически безграничны.
Нанотехнологии обладают потенциалом решить крупнейшие проблемы, с которыми сегодня столкнулся мир. Они могли бы улучшить производительность людей, обеспечить нас всеми необходимыми материалами, водой, энергией и едой, защитить нас от неизвестных бактерий и вирусов и даже уменьшить число причин для нарушения мира.
Если этого мало, рынок нанотехнологий просто огромен. К 2020 году мировая отрасль нанотехнологий вырастет до рынка в 75,8 миллиарда долларов.
Области применения робототехники
Применяются роботы самых различных сферах, но основными являются следующие:
- Промышленность: промышленные роботы;
- Исследовательская деятельность: роботы-ученые, исследователи;
- Боевые роботы: безпилотники, роботы-саперы, охрана и безопасность;
- Нанотехнологии: микро- и нано-роботы в исследовательских и медицинских целях;
- Домашние технологии: бытовые роботы, пылесосы, мойщики окон и персональные.

В сфере промышленности роботы позволяют выполнять большой объем работ с высокой скоростью и точностью. Они позволяют решать такие задачи, с которыми невозможно справиться человеческими силами.
Очень многие места нашей планеты и за ее пределами не исследованы по той причине, что делать это человеку невозможно. Например, о том, что творится в океанных глубинах и в космосе мы знаем благодаря роботам-исследователям.
https://youtube.com/watch?v=0xteyLvaNlk
Рост инновационных технологий позволяет оптимистически смотреть в будущее. Робототехника стремительно развивается, открывая человечеству новые возможности.
H-мост на механических переключателях
Направление вращения вала у двигателя постоянного тока зависит от полярности питания. Чтобы изменить эту полярность, без переподключения источника питания, мы можем использовать 4 переключателя, как показано на следующем рисунке.
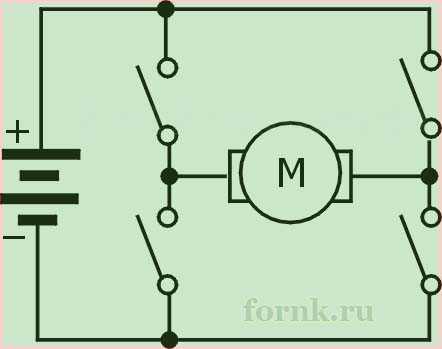
Этот тип соединения известен как «H Bridge» (H мост) — по форме схемы, которая похожа на букву «H». Эта схема подключения двигателя имеет очень интересные свойства, которые мы опишем в этой статье.
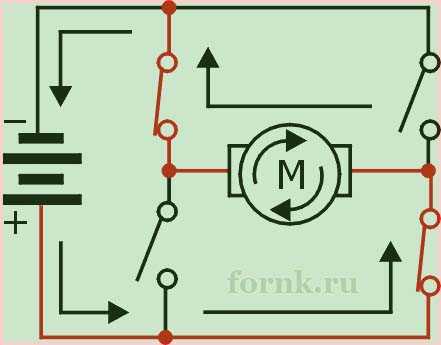
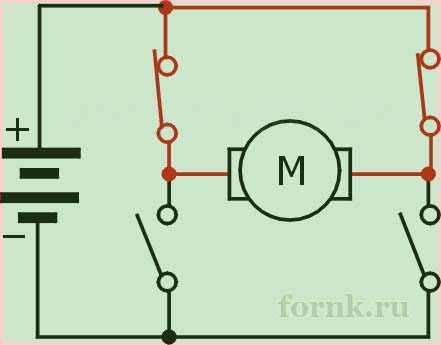
Если мы замкнем верхний левый и нижний правый переключатели, то двигатель будет подключен справа на минус, а слева на плюс. В результате этого он будет вращаться в одном направлении (путь прохождения тока указан красными линиями и стрелками).
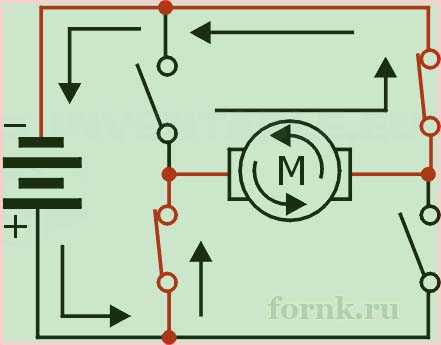
Если же мы замкнем верхний правый и нижний левый переключатели, то двигатель будет подключен справа на плюс, а слева на минус. В таком случае двигатель будет вращаться в противоположном направлении.
Эта схема управления имеет один существенный недостаток: если оба переключателя слева или оба переключателя справа замкнуть одновременно, то произойдет короткое замыкание источника питания, поэтому необходимо избегать такой ситуации.
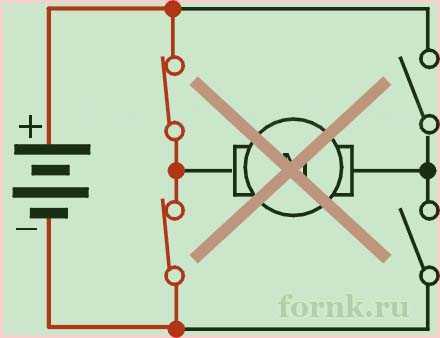
Интересным состоянием следующей схемы является то, что используя только два верхних или нижних переключателя, мы отключаем двигатель от питания, в результате чего двигатель останавливается.
Конечно, H-мост, выполненный исключительно только на переключателях, не очень универсален. Мы привели этот пример только для того, чтобы простым и наглядным образом объяснить принцип работы H-моста.
Но если мы заменим механические переключатели электронными ключами, то конструкция будет более интересна, поскольку в этом случае электронные ключи могут быть активированы логическими схемами, например, микроконтроллером.
Немного определений: стандарты по робототехнике
Пойдем по порядку. Итак, слова «исполнительный механизм» говорят нам о том, что робототехники признают роботами только некие механические агрегаты, оснащенные приводами. Этим робототехники отличаются от программистов, которые могут называть роботом или ботом
В конце концов, вполне обычное дело, когда разные области знаний используют одни и те же слова для описания собственных смыслов. Пока просто запомним это разночтение.
Далее в ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 сказано про «определенную степень автономности», понимаемой как
Так все же, господа робототехники, роботы это или не роботы?
Кроме того, этакой несколько наивной формулировкой об «определенной степени автономности» разработчики стандарта как бы намекают на свою неспособность дать точное определение термину «робот». Что такое определенная степень автономности и кем она определена? Является ли признаком робота определенная полная автономность, или же определенная никакая — тоже? Впрочем, действительно, на этот вопрос однозначно не ответить, но, по крайней мере, отмечено стремление хоть к какой-нибудь автономности.
Далее имеем неточность в словах «способный перемещаться во внешней среде», так как перемещение представляет собой
Современный промышленный робот-манипулятор, который не изменяет своего местоположения в пространстве, но отвечает другим предъявленным требованиям (программируется по двум и более степеням подвижности и обладает определенной степенью автономности, особенно если, скажем, оснащен техническим зрением), должно быть, с удивлением узнает, что он роботом не является. Здесь была бы более точна формулировка из предшествующего ГОСТ Р ИСО 8373-2014 от ООО «НИИ экономики связи и информатики «Интерэкомс», который как раз и был заменен обсуждаемым более свежим стандартом, а именно: «движущийся внутри своей рабочей среды».
Кстати, в англоязычном оригинале это определение звучит так:
Мне кажется, коллеги из НИИ экономики связи и информатики лучше разобрались в роботах, чем коллеги из ЦНИИ робототехники. Шутка (зато термин «степень подвижности» от ЦНИИ РТК более уместен, чем «ось» от «Интерэкомс»). Но и в целом, ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 грешит подобными неточностями (где в переводе, а где и в робототехнической терминологии).
Зато в нём же приведена сноска с еще одним, чуть менее противоречивым, определением робота:
Мы обсудили свежие стандарты по робототехнике. А ведь ещё есть и более ранние. Правда, они были выпущены в 1980-х гг. и уже настолько устарели, что вовсе не помогут нам в понимании, что же такое современный робот.
Что ж, будем считать, что со стандартами стало яснее. А вот с роботами — нет. Какая-то путаница.
Как будут развиваться роботы
Сложно представить, что только не будут уметь роботы в ближайшие десятилетия. Уже созданы роботизированные мышцы, которые в 1000 раз сильнее человеческих и способны поднимать грузы в 50 раз больше собственного веса. Дальнейшее развитие роботов будет связано с открытием новых материалов и свойств, а также достижений компьютерной техники.
Программное обеспечение манипуляторов со временем увеличит возможности техники и сенсоров. Например, робот-манипулятор, захватывающая груз, сможет сообщить оператору точный вес или размер, а новые компьютерные технологии смогут обеспечить более сложные траектории. Будет повышена эффективность использования нейросетей за счет усложнения их архитектуры и снижения энергопотребления. Продолжится массовое внедрение облачных сервисов для машинного обучения, что расширит двигательные действия роботов.
Двигатель V-типа (V-образный силовой агрегат)
V-образный двигатель разделяет все цилиндры на две группы друг напротив друга под определенным углом. В итоге мотор образует плоскость под углом. Если посмотреть на этот тип двигателя со стороны, то он будет иметь V-образную форму. V-образные двигатели имеют небольшую высоту и длину. Этот тип моторов удобнее размещать в автомобиле по сравнению с обычными рядными моторами, которые по своим размерам гораздо больше.
В настоящее время во многих автомобилях среднего и люкс-класса используются V-образные двигатели. Чаще всего это 6-цилиндровые силовые агрегаты. Например, такие двигатели стоят на Volkswagen Passat, Audi A6 и Mercedes E-класса AMG.





