Общепромышленные электрические двигатели
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
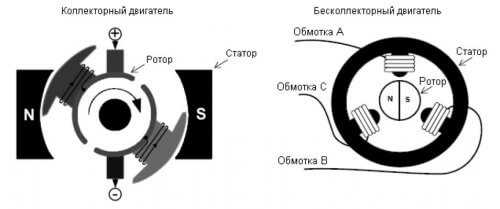
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
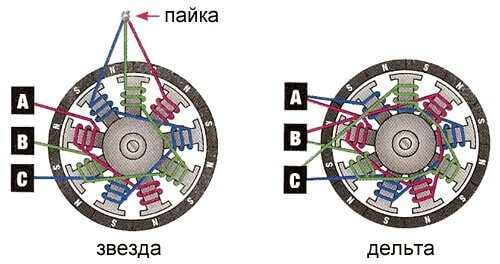
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
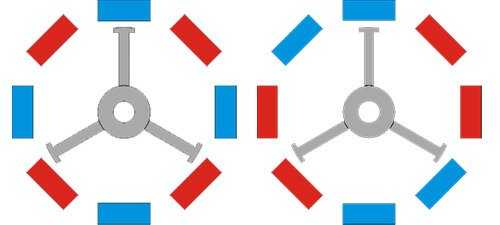
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
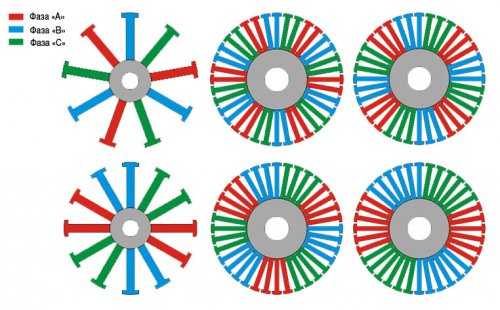
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
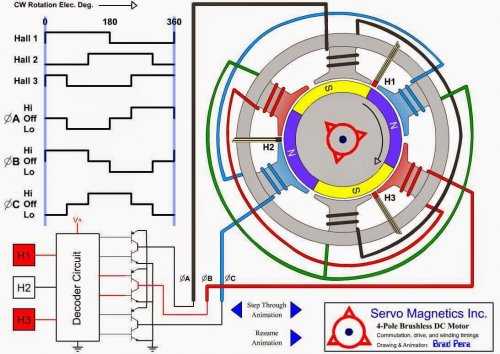
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер “знал”, в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Рабочие моменты
Давайте разберем некоторые характеристики и особенности машин постоянного тока.
Пуск и режим реверса
 К электрическому двигателю подключен регулятор оборотов
К электрическому двигателю подключен регулятор оборотов
В момент, когда двигатель запускается, якорь имеет неподвижное положение, а значит, ЭДС в нем равна нулю. Из-за того, что сопротивление якорной обмотки очень маленькое, пусковой тока якоря намного превышает номинальный. Если представить себе такой пуск двигателя, то он однозначно бы вышел из строя.
- Чтобы такого не происходило, пусковой ток в двигателях постоянного тока с параллельным возбуждением ограничивается за счет включенного в цепь пускового реостата.
- Пуск при этом необходимо производить при номинальном значении магнитного потока, благодаря чему увеличивается пусковой момент и быстро растет ЭДС в обмотке якоря. В результате двигатель разгоняется быстрее, а время, когда проходит большой пусковой ток по обмотке сокращается.
- Когда разгон двигателя завершается, реостат выводится из цепи – делается это либо плавно, либо ступенчато.
- Для того чтобы остановить двигатель, достаточно отключить подачу питания к нему.
- Для любого электрического двигателя доступен режим вращения в обратном направлении – реверс. Для этого нужно всего лишь изменить направление тока либо в обмотке якоря, либо в обмотке статора.
Потери мощности и КПД
 Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Даже самый технически совершенный двигатель постоянного тока не может работать без потерь мощности
Любой двигатель или генератор постоянного тока работает с потерями мощности. Их делят на два типа: основные и добавочные.
- К первым относят магнитные, электрические и механические.
- Магнитные потери, происходящие в стали обозначают ΔРс. Происходят они из-за того, что во время вращения сердечник на якоре постоянно перемагничивается, поэтому возникают потери на гистерезис и вихревые токи.
- Электрические потери (ΔРэл) происходят из-за активного сопротивления обмоток, а также сопротивления щеточного контакта, то есть данное значение представляется в виде суммы указанных потерь.
- Механические (ΔРмех) включают потери на трение подшипников, трение щеток о коллектор, трение вращающегося якоря о воздух (и такое есть) и вентиляционные потери.
- Все остальные потери называются добавочными и связаны они в основном с взаимодействием различных частей агрегата с магнитным полем.
 Потери незначительны при отсутствующей нагрузке
Потери незначительны при отсутствующей нагрузке
Для расчета каждого типа потерь применяются специальные формулы. Мы не будем так глубоко вдаваться в суть, а скажем лишь, что КПД машины постоянного тока определяется отношением отдаваемой мощности, к потребляемой. Выражают данное значение обычно в процентах.
Современные машины постоянного тока стали очень эффективными. КПД у них обычно варьируется в пределах 75-90%.
Рабочие характеристики
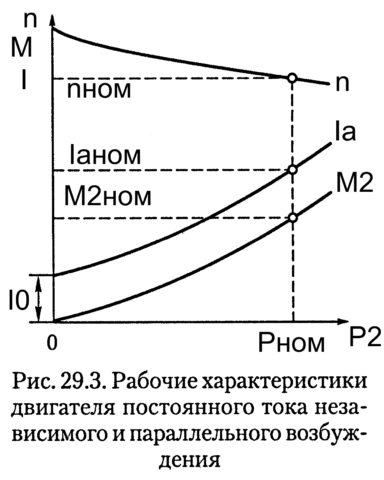 Рабочие характеристики ДПТ
Рабочие характеристики ДПТ
Рабочие характеристики представляют собой следующие зависимости:
- Скорости вращения, потребляемого тока и мощности двигателя;
- КПД от полезной мощности при условии, что напряжение питания неизменно.
- Тока обмотки возбуждения и отсутствия добавочного сопротивления в цепи якоря.
Все эти параметры позволяют говорить о свойствах двигателей в режиме эксплуатации, а также находить оптимальные и экономичные режимы их работы.
Регулировка скорости вращения двигателя
 Принципиальная схема регулятора оборотов вращения
Принципиальная схема регулятора оборотов вращения
Регулировать скорость вращения машины постоянного тока можно тремя способами: изменение напряжения сети, реостатное регулирование, изменение магнитного потока. Давайте обо всем по порядку.
- Изменение напряжения осуществляется за счет устройств, которые могут, собственно, менять величину напряжения.
- Реостатное регулирование, как мы уже упоминали по ходу статьи, нуждается во введении в цепь якоря дополнительных резисторов активного типа, то есть меняющих свои характеристики при определенных условиях.
- Регулирование магнитного потока происходит за счет уменьшения тока возбуждения.
Конечно, мы назвали не все характеристики машин постоянного тока, а лишь основные, но для ознакомления с этими агрегатами этого вполне достаточно.
https://youtube.com/watch?v=eNo6ja-scE0
Видео в этой статье продемонстрирует, как работают данные устройства.
Устройство машины постоянного тока
ГПТ может использоваться как ДПТ без каких-либо конструктивных изменений. Конечно, промышленностью выпускаются машины, предназначенные для работы в качестве двигателей, и машины, являющиеся генераторами. Однако отличия между ними состоят в конструкции отдельных частей, и на этапе общего ознакомления могут быть проигнорированы. Следовательно, далее будем рассматривать устройство машины постоянного тока в общем, без привязки к режиму ее работы.
Ниже на рисунке показан поперечный разрез простой МПТ с двумя парами явно выраженных полюсов. Конструкция ее содержит две основные части: статор и якорь. Рассмотрим, из каких деталей они состоят.
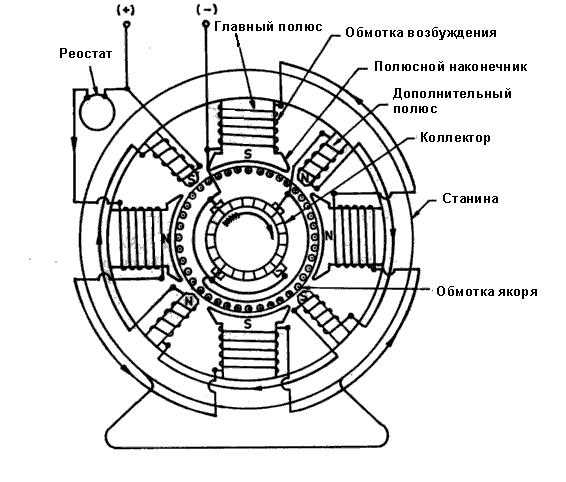
Статор содержит станину, а также главные и находящиеся между ними дополнительные полюсы (на рисунке не показаны).
Станина – это внешняя конструктивная оболочка МПТ. Она бывает литой из чугуна (у машин старых конструкций) или сварной из толстого листа стали. Станина механически прочно скрепляет всю сборку МПТ. Кроме того, она служит магнитопроводом для магнитного потока, производимого главными полюсами.
Последние прикреплены к станине с помощью винтов или сварки. Основное их назначение – нести катушки обмотки возбуждения, намотанные на них и соединенные последовательно между собой таким образом, чтобы магнитная полярность полюсов чередовалась, т. е. после «северного» полюса следовал бы «южный» и т. д.
Полюсные наконечники (башмаки), являющиеся расширением главных полюсов, служат двум целям: для предотвращения соскальзывания катушек и для равномерного распределения поля возбуждения на большей части окружности воздушного зазора.
Якорь машины постоянного тока состоит из сердечника с обмоткой, втулки и вала. Сердечник – это стальной каркас цилиндрической формы, сложенный из тонких электрических листов стали, покрытых с обеих сторон электроизоляционным лаком. Это делается для предотвращения появления вихревых токов, стремящихся замкнуться в толще сердечника. В пазах его уложены секции петлевой или волновой обмотки якоря, коллектор машины постоянного тока и щетки. Обмотку якоря нужно присоединить к внешней электросети постоянного тока. Но нельзя непосредственно соединить выводы обмотки с сетевым вводом, потому что она вращается. Поэтому между сетью и обмоткой якоря установлен коммутатор-коллектор, представляющий собой множество изолированных друг от друга пластин из меди, образующих внешнюю цилиндрическую поверхность, разделенную изоляционными дорожками. Неподвижные контактные щетки скользят по ней, когда якорь с коллектором вращаются. Таким образом неподвижные щетки физически соприкасаются с вращающейся обмоткой якоря, а с их помощью уже можно выполнить подключение к внешней сети машины постоянного тока.
Конструкция якоря
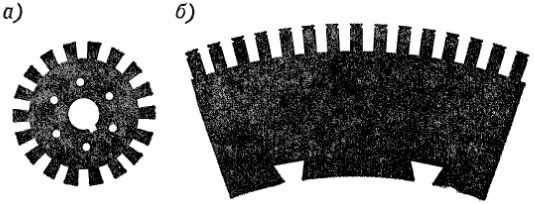
Рисунок 2. Диск (а) и сегмент (б) стали якоря
Сердечник якоря набирается из штампованных дисков (рисунок 2, а) электротехнической стали толщиной 0,5 мм. Диски насаживаются либо непосредственно на вал (при Dа ≤ 75 см), либо набираются на якорную втулку (Dа ≥ 40 см), которая надевается на вал. Сердечники якоря диаметром 100 см и выше составляют из штампованных сегментов (рисунок 2, б) электротехнической стали. Сегменты набираются на корпус якоря, который изготовляется обычно из листового стального проката и с помощью втулки соединяется с валом. Для крепления к корпусу якоря сегменты отштамповываются с гнездами для ласточкиных хвостов либо с выступающими ласточкиными хвостами (рисунок 3).
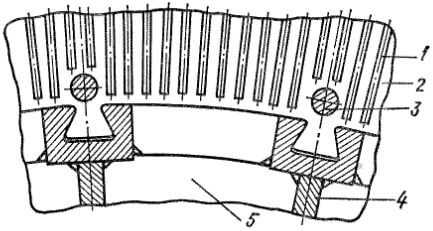
Рисунок 3. Крепление сегментов стали якоря с помощью ласточкиных хвостов
1 – вентиляционные распорки; 2 – лист стали якоря; 3 – стяжной болт; 4 – ребро ступицы якоря; 5 – лист ступицы якоря
В сердечнике якоря в зависимости от выбранной системы вентиляции могут быть аксиальные или радиальные каналы. Аксиальные каналы образуются выштампованными в дисках сердечника отверстиями. Радиальные каналы создаются с помощью вентиляционных распорок или ветрениц, посредством которых сердечник якоря (рисунок 4) подразделяется на отдельные пакеты 1 шириной 40 – 70 мм и каналы 2 между ними шириной около 5 – 10 мм. Ветреницы приклепываются или привариваются к крайним листам пакетов. Сердечник якоря крепится с помощью нажимных плит или фланцев 6.
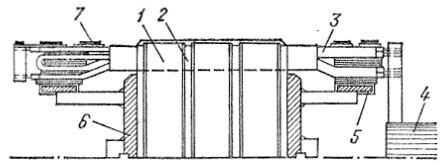
Рисунок 4. Сердечник якоря с обмоткой
В пазы на внешней поверхности якоря укладываются катушки обмотки якоря. Выступающие с каждой стороны из сердечника якоря (рисунок 4) лобовые части обмотки 3 имеют вид цилиндрического кольца и своими внутренними поверхностями опираются на обмоткодержатели 5, а по внешней поверхности крепятся проволочными бандажами 7. Обмотка соединяется с коллектором 4.
Воздушный зазор между полюсами и якорем в малых машинах менее 1 мм, а в крупных – до 1 см.
Конструкция щеточного аппарата
Для отвода тока от вращающегося коллектора и подвода к нему тока применяется щеточный аппарат, который состоит из щеток, щеткодержателей, щеточных пальцев, щеточной траверсы и токособирающих шин.
Одна из типичных конструкций щеткодержателя показана на рисунке 5. Щеткодержатели укрепляются на щеточных пальцах. На каждом щеточном пальце обычно помещают несколько или целый ряд щеткодержателей со щетками, которые работают параллельно. Щеточные пальцы, число которых обычно равно числу главных полюсов, крепятся к щеточной траверсе (рисунок 7)
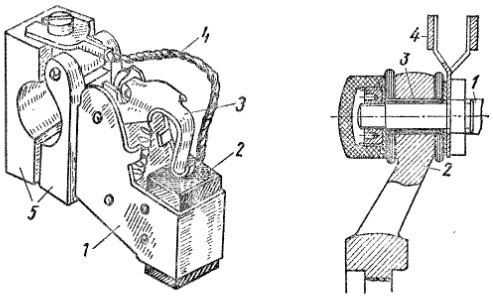
Рисунок 6. Щеткодержатель со щеткой 1 – обойма щеткодержателя; 2 – щетка; 3 – нажимная пружина; 4 – токоведущий кабель; 5 – колодки для крепления к пальцу
Рисунок 7. Крепление щеточного пальца к траверсе 1 – палец; 2 – траверса; 3 – изоляция; 4 – токособирательная шина
и электрически изолируются от нее. Траверса крепится к неподвижной части машины: в машинах малой и средней мощности – к втулке подшипникового щита, а в крупных машинах – к станине. Обычно предусматривается возможность поворота траверсы для установки щеток в правильное положение. Полярности щеточных пальцев чередуются, и все пальцы одной полярности соединяются между собой сборными шинами. Шины с помощью отводов соединяются с выводными зажимами или с другими обмотками машины.
Коллектор и щеточный аппарат являются весьма ответственными узлами машины, от конструкции и качества изготовления которых в большой степени зависит бесперебойная работа машины и надежность электрического контакта между коллектором и щетками.
Работа машины постоянного тока в режиме генератора
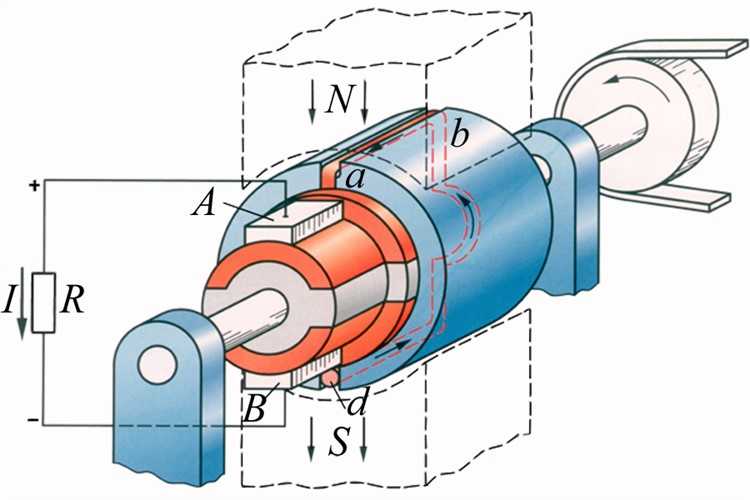
§ 110. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В РЕЖИМЕ ГЕНЕРАТОРА Якорь генератора приводится во вращение каким-либо двигателем, развивающим вращающий момент М1. При перемещении проводников обмотки якоря в магнитном поле полюсов в них индуктируется э.д.с, направление которой определяется правилом правой руки (рис. 142). Если якорь вращается с числом оборотов в минуту п, то в его обмотке индуктируется э. д. с.
Если обмотку якоря через щетки замкнуть на какой-либо приемник энергии г (сопротивление нагрузки), то через этот приемник и обмотку якоря будет протекать ток Iя, который в обмотке якоря имеет направление, совпадающее с направлением э.д.с. В результате взаимодействия этого тока с магнитным полем полюсов создается электромагнитный момент Мэ, направление которого определяется правилом левой руки.
Таким образом, развиваемый машиной электромагнитный момент является тормозным, направленным встречно направлении вращения якоря машины, так что для вращения последнего первичный двигатель должен развивать вращающий момент М1 достаточный для преодоления электромагнитного тормозного момента,
следовательно, машина потребляет механическую энергию.
В случае равновесия моментов, т. е. М1== Мэ, якорь машины вращается с неизменно скоростью. При нарушении равновесия моментов число оборотов якоря начнет изменяться. Если почему-либо момент первичного двигателя уменьшится, т. е. станет меньше электромагнитного момента генератора (М1 Мэ) число оборотов якоря, а также э. д. с. и ток в его обмотке будут увеличиваться, что вызывает увеличение тормозного электромагнитного момента.
При нарушении равновесия моментов число оборотов якоря, э.д.с. и ток в его обмотке претерпевают изменения до восстановления равновесия моментов, т. е. пока электромагнитный момент генератора не станет равным вращающему моменту первичного двигателя.
Таким образом, любое изменение момента первичного двигателя, т. е. потребляемой генератором мощности, вызывает соответствующее изменение как электромагнитного момента генератора, так и вырабатываемой им мощности. Так же при изменениях нагрузки генератора потребуется соответствующее изменение момента первичного двигателя для поддержания постоянства числа оборотов якоря генератора.
Ток обмотки якоря Iя, протекающий при нагрузке генератора, встречает на своем пути сопротивление внешней нагрузки rн, сопротивление обмотки якоря rоб и сопротивление переходных контактов между щетками и коллектором rщ. Обозначив через rя внутреннее сопротивление машины, представляющее собой сумму сопротивлений обмотки якоря и щеточных контактов (rоб+rщ), для тока в якоре можем записать следующее выражение:
Сопротивление rщ непостоянно и зависит от большого числа факторов, как-то: величины и направления тока, состояния коллектора, силы нажатия щеток на коллектор, скорости вращения, радение напряжения в щеточных контактах остается примерно нанесенным при изменениях нагрузки (принимается равным 2 в на пару угольных и графитных щеток).
Поэтому внутреннее сопротивление машины rя также не являйся величиной постоянной при изменении нагрузки генератора.
Так как Iяrн=U, где (U— напряжение на зажимах генератора при нагрузке, то получим следующее уравнение равновесия э.д.с. лля генератора:
Из уравнения равновесия э.д.с. легко получить уравнение мощностей, т. е.
где Р2 — полезная мощность генератора, отдаваемая потребителю электрической энергии,
Рэ— внутренняя или электромагнитная мощность генератора, преобразованная им в электрическую,
Роб —потери мощности в обмотке якоря и щеточных контактах.
При холостом ходе генератора электромагнитная мощность равна нулю (Рэ=0), но для вращения якоря машины первичный двигатель должен затратить некоторую мощность Р, расходуемую на покрытие потерь холостого хода. Мощность Р складывается из потерь механических на трение в подшипниках и трение о воздух вращающихся частей машины Рмех и из потерь в стали на
гистерезис и вихревые токи Pст.В генераторах с самовозбуждением мощность Р включает также мощность, затраченную на создание магнитного потока, т. е. на возбуждение машины.
При нагрузке генератора первичный двигатель затрачивает мощность Р1 = Рэ + Ро.
Электромагнитный момент машины
где
— угловая скорость якоря.
то электромагнитный момент машины определится следующим выражением:
Величины а, р
иN постоянны для данной машины, поэтому выражение представляет собой некоторый постоянный для данной машины коэффициент и электромагнитный момент равен:
Перспективы развития электрических машин постоянного тока
Статистически данные указывают на то, что наиболее часто различные виды электрических машин можно встретить именно в потребительском секторе.
Это объясняется тем, что подобные устройства присутствуют почти во всех сферах жизни человека. Наиболее ярким примером являются системы управления легковых автомобилей. Изменение положения сидений, открытие окон, работа дворников – все это микроэлектромашины переменного тока.
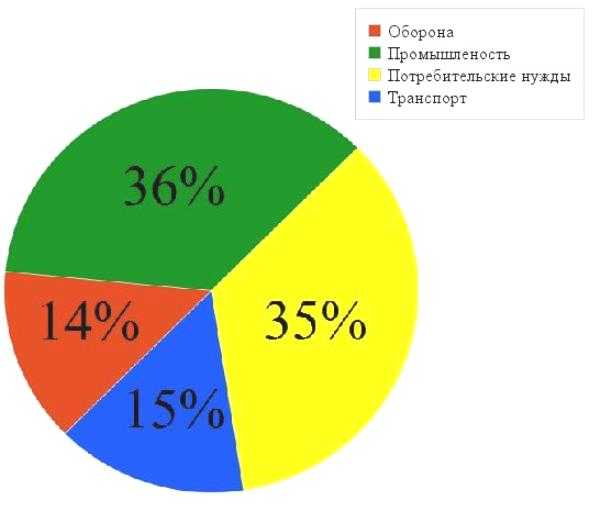
Несмотря на то, что наиболее активно устройства такого рода разрабатываются для промышленных и оборонных целей, в последнее время все больше начали подниматься вопросы оптимизации и улучшения показателей микромашин.
Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.

Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Принцип действия
Особенности функционирования МПТ зависит от того, в каком режиме она работает — генератора или двигателя. Далее подробно рассматриваются оба варианта.
Генератор
Принцип работы генератора постоянного тока основан на явлении электромагнитной индукции. Состоит оно в том, что при изменении магнитного потока, пересекающего проводник, в последнем наводится ЭДС.
Принцип действия генератора постоянного тока
Чтобы добиться изменения магнитного потока, меняют параметры поля либо двигают в постоянном поле проводник. По второму варианту и работает генератор постоянного тока: обмотка якоря приводится во вращение внешней механической силой.
Очевидно, что после поворота витков обмотки на 180 градусов ЭДС окажется направленной противоположно. Сохранить ток в подключенной к генератору цепи постоянным, то есть однонаправленным, помогает коллектор: в нужный момент он переподключает концы обмотки якоря к противоположным контактам цепи (щеткам). То есть в этой машине коллектор играет роль механического выпрямителя.
При наличии всего двух основных полюсов ток получится пульсирующим. Увеличение числа полюсов приводит к сглаживанию пульсаций.
Двигатель
Работа МПТ в режиме двигателя обусловлена возникновением так называемой амперовой силы. Она действует на помещенный в магнитное поле проводник при протекании по нему тока. Направление амперовой силы определяется по правилу левой руки.
Сила Ампера появляется благодаря следующему механизму:
- при протекании тока вокруг проводника возникает магнитное поле с силовыми линиями, концентрически окружающими проводник (круговое поле);
- вектор его индукции по одну сторону от проводника сонаправлен с вектором индукции первичного магнитного поля, в которое проводник помещен. С этой стороны первичное поле усиливается;
- по другую сторону вектор наведенного электротоком поля направлен противоположно вектору индукции первичного поля, соответственно, здесь оно гасится;
- разница в индукции поля по обе стороны проводника активирует к возникновению данной силы. Определяется она по формуле: F = B * I * L, где: B — магнитная индукция первичного поля, I — сила тока в проводнике, L — длина проводника.
Как и в случае с генератором, после поворота витка обмотки якоря в определенное положение, требуется переключение контактов для изменения в ней направления тока либо полярности индуктора. Поэтому в режиме двигателя коллектор также необходим.
У коллекторных двигателей есть преимущества:
- простота и широкий диапазон регулировки;
- жесткая механическая характеристика (вращающий момент остается стабильным).
Недостаток — низкая надежность коллектора и его сложность, негативно отражающаяся на стоимости двигателя.
Вот какими нежелательными явлениями сопровождается работа узла:

- искрение;
- засорение токопроводящей графитовой пылью (щетки выполнены из этого материала);
- появление помех в сети;
- при значительной нагрузке — кольцевое искрение («круговой огонь»), приводящее к выгоранию коллекторных пластин.
В целях борьбы с недостатками в некоторых современных двигателях постоянного тока (ДПТ) применены следующие решения:
- обмотки якоря и индуктора меняются местами: первую размещают на неподвижной части (статоре), вторую — на вращающейся (роторе). Скользящий контакт при этом остается, но из-за низкой нагрузки в обмотке возбуждения, он намного проще и надежнее коллекторно-щеточного;
- переключение между обмотками якоря, теперь расположенного в неподвижной части, осуществляется при помощи полупроводниковых ключей, срабатывающих по сигналу датчика положения ротора. То есть механический переключатель (коллектор) заменен электронным.
Такие двигатели называют бесколлекторными, за рубежом — BLDC-двигателями.
Режим двигателя
Рассматриваемая простейшая машина может работать также двигателем, если обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы Fпр и возникнет электромагнитный момент Mэм. Величины Fпр и Mэм, как и для генератора, определяются равенствами (4) и (5). При достаточном значении Mэм якорь машины придет во вращение и будет развивать механическую мощность. Момент Mэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направление вращения генератора (рисунок 2, а) и двигателя (рисунок 2, б) были одинаковы, то направление действия , а следовательно, и направление тока Iа у двигателя должны быть обратными по сравнению с генератором (рисунок 2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве инвертора тока.
Проводники обмотки якоря двигателя также вращаются в магнитном поле, и поэтому в обмотке якоря двигателя тоже индуктируется э. д. с. Eа, значение которой определяется равенством (1).
Направление этой э. д. с. в двигателе (рисунок 2, б) такое же, как и в генераторе (рисунок 2, а). Таким образом, в двигателе э. д. с. якоря Eа направлена против тока Iа и приложенного к зажимам якоря напряжения Uа. Поэтому э. д. с. якоря двигателя называется также противоэлектродвижущей силой.
Приложенное к якорю двигателя напряжение уравновешивается э. д. с. Eа и падением напряжения в обмотке якоря:
| Uа = Eа + Iа × rа. | (6) |
Из сравнения равенств (3) и (6) видно, что в генераторе Uа < Eа , а в двигателе Uа > Eа.
Устройство (схема) двигателя постоянного тока
Конструкция электродвигателя постоянного тока состоит
из следующих элементов:
1.вал электродвигателя, на который устанавливаются остальные детали.
2. якорь (ротор) двигателя, который включает в себя:
2.1.сердечник якоря, представленный в виде набора пластин из специальной электротехнической стали;
2.2.якорная обмотка;
2.3.коллектор;
2.4.главный полюс, представляющий собой набор пластин из электротехнической стали. Для двигателей малых размеров полюсы изготавливаются из постоянных магнитов;
2.5.обмотка возбуждения;
2.6.монолитные добавочные полюса (в двигателях малых размеров не применяются) предназначены для улучшения коммутации и располагаются между главными полюсами;
2.7.обмотка из эмалированных проводов добавочного полюса;
3.
корпус электродвигателя, который чаще всего выполняется из чугуна, так как данный материал обеспечивает возможность эксплуатации электродвигателя в местах с агрессивной средой и обладает высоким уровнем устойчивости к износам. Также для улучшения корпус двигателя может изготавливаться со специальными ребрами, которые обеспечивают термический баланс электродвигателя. Полюсы, образующие индуктор, а также якорь, устанавливаются в корпус двигателя.
4.клеммная коробка. Концы обмоток полюсов двигателя выводятся в клеммную коробку, в которой установлены клеммы с подключенными концами обмоток индуктора и клеммы для подключения щеток якоря. Также предусмотрено одно-два отверстия для установки сальников, через которые заводятся силовые кабели для подключения питания. В машинах малой мощности выводы обмоток размещаются в клеммной коробке, при этом один из зажимов добавочных полюсов и один из зажимов якоря (щеточная траверса) соединены наглухо внутри машины, а в клеммную коробку выведены другие зажимы якоря и добавочных полюсов. В крупных машинах с высоким номинальным током клеммная коробка отсутствует, а выводные концы размещаются в нижней части станины машины. При этом выводные концы параллельной цепи выполняются в виде жил кабелей с наконечниками, последовательной – в виде шин.
Также в конструкции присутствуют такие элементы:
•передний и задний подшипниковые щиты, а также внутренние подшипниковые крышки, которые прикручиваются к подшипниковым щитам;
•щеточный узел, который состоит из кронштейна, щеткодержателей и щеток (графитовых или металло-графитовых). Данный узел крепится на выпуклой части подшипниковой крышки заднего подшипникового щита. Он предназначен для подвода “питания” к катушкам на вращающемся роторе и переключения тока в обмотках якоря;
•
вентилятор охлаждения, обеспечивающий поддержание низкой рабочей температуры;
•подшипниковые щиты;
•подшипники;
•наружные подшипниковые крышки, закрывающие подшипники;
•проушины или рым-болты, которые упрощают погрузочно-разгрузочные работы и монтаж двигателя;
•лапы, которые обеспечивают низкий уровень вибрации электродвигателя во время работы;
•защитный кожух вентилятора и кожух выхода воздуха обдува;
•шильдик, на котором указывается основные характеристики двигателя.
Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.
Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
Наиболее приемлемым вариантом будет регулятор на основе симистора или тиристора. Мало того что такой регулятор не уменьшает мощность при уменьшении напряжения, он еще и позволяет осуществлять более плавный пуск и регулировку оборотов. К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
Схема выглядит следующим образом.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.





