Тест сервомотора….
Прошло уже четыре месяца как начал осваивать ардуино с нуля
(начало изучения как раз приходиться на начало января 2016 года). Как
говориться уже успел разобраться со многим: и с программированием, и с
датчиками. Вот наконец подошло время и для сервомотора. Модуль у меня самый что
ни на есть простейший и самый наверно недорогой — TowerPro SG90. Для начала
давайте познакомимся с его техническими данными:

Технические характеристики
— рабочее напряжение: 3,5-6В
— диапазон вращения: 180°
— скорость вращения без нагрузки при 4,8В: 60° за 0,12с
— скорость вращения без нагрузки при 6В: 60° за 0,10с
— максимальный крутящий момент: 1,6 кг·см
— габаритные размеры ДхШхВ: 23х12х29мм
— вес: 9г
Механизм сервопривода выполнен из пластика. В комплекте с
сервоприводом идёт комплект крепежа и пластиковых качелек. Для подключения
сервопривода не требуется силового драйвера. То есть наш сервомотор можно
подключить напрямую к плате ардуино. Но еще нужно разобраться какие провода
сервомотора куда подключать.
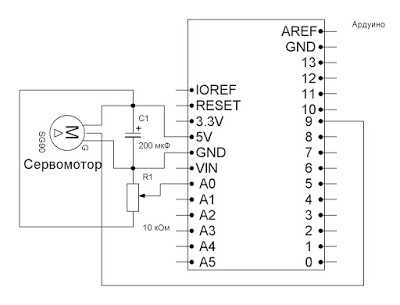
В моем случае сервомотор имеет три разноцветных провода,
которые нужно подключить к источнику питания (+5 В), земле (GND) и к управляющему пину ардуино. Соответственно
серый провод подключается к земле, желтый к 9 пину ардуино, оранжевый к +5 В. Схема
подключения сервомотора к ардуино несложная, но на всякий случай нарисую ее.
Самое главное это не только подключить сервомотор, но так же еще научиться
управлять им. Для начала используем переменный резистор, поворачивая его мы
будем изменять его сопротивление и при этом сервомотор будет поворачиваться на
заданный угол.
Конечно же управлять сервомотором дело сложное. Но за нас
уже подумали и написали библиотеку: «Servo.h»,
искать ее не нужно: так как она уже входит в стандартную библиотеку. Так что
смело подключаем ее в скетче. Да и сам скетч привожу ниже:
#include
<Servo.h> // подключаем
библиотеку сервы
#define
POT_MAX_ANGLE 200.0 // макс. Угол поворота ручки потенциометра в градусах
Servo
myServo;
void
setup() {
myServo.attach(9);
// подключаем серву к 9 пину
}
voidloop()
{
intval
= analogRead (A0); // считываем данные с потенциометра
intangle
= int (val/1024.0*POT_MAX_ANGLE);
// рассчитываем угол поворота серва
angle
= constrain(angle,0,180); // ограничиваем
угол поворота от 0 до 180
myServo.write(angle); // даем команду серве задать
угол поворота
}
Вот и все! Загружаем
скетч в микроконтроллер, и начинаем тестирование. Действительно с помощью
поворота ручки переменного резистора мы управляем углом поворота сервомотора в
пределах от 0 до 180 градусов. Все получилось удачно и отлично все работает,
чего желаю и всем читателям.
https://youtube.com/watch?v=J1QK0SnYugQ
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
-
красный — питание; подключается к контакту 5V или напрямую к источнику питания
-
коричневый или чёрный — земля
-
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода: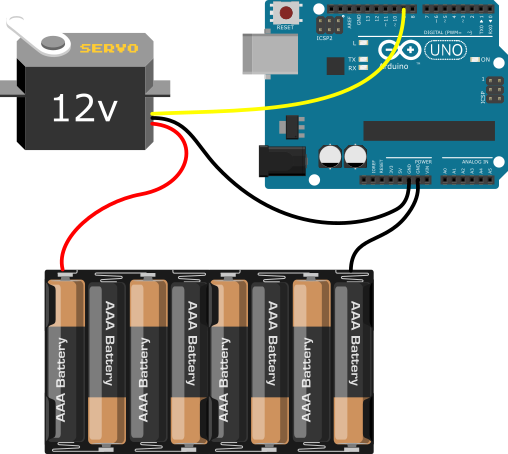
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объект для управления сервоприводомServo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
По аналогии подключим 2 сервопривода
2servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объекты для управления сервоприводамиServo myservo1;Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12);} void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500);}
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
servo2_example.ino// подключаем библиотеку для работы с сервоприводами// данная библиотека совместима с библиотекой «VirtualWire»// для работы с приёмником и передатчиком на 433 МГц#include <Servo2.h> // создаём объект для управления сервоприводомServo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
Общие принципы работы серводвигателей (сервомоторов)
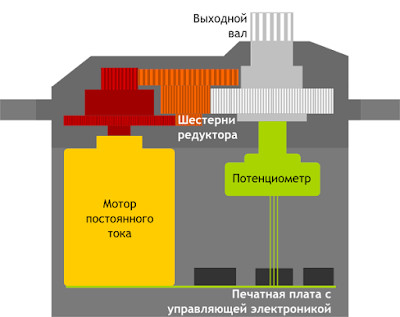
Серводвигатели включают в свой состав небольшой двигатель постоянного тока, редуктор и схему управления, содержащую переменный резистор, дающий возможность установить выходной вал серводвигателя под определенным углом. Поэтому серводвигатели очень удобны для проектов, где требуется осуществлять весьма быстрое и относительно точное перемещение какого-либо рабочего органа.
Типы серводвигателей
Серводвигатели часто используются в радиоуправляемых моделях автомобилей для поворота рулевых колес или в моделях радиоуправляемых самолетов – для поворота управляющих поверхностей (рулей). На следующем рисунке показаны два серводвигателя разных размеров.

Серводвигатель справа представляет собой так называемый стандартный серводвигатель. Это наиболее распространенный тип серводвигателя. Такие серводвигатели достаточно часто имеют одинаковые размеры и монтажные расстояния между отверстиями. Намного меньший (и более легкий) серводвигатель слева предназначен для летательных аппаратов. Эти серводвигатели называются сервоприводами 9g .
Сервоприводы с более высоким качеством исполнения и более высоким крутящим моментом имеют редуктор с шестернями из металла, а не из нейлона. Большинство серводвигателей работают на номинальном напряжении питания около 5 В при допустимом диапазоне питающих напряжений от 4 до 7 В. Подключение любительских сервоприводов обычно осуществляется через провода, заканчивающиеся 3-контактным разъемом: питание +, питание — и управляющий сигнал.
Большие и иногда весьма мощные серводвигатели также доступны для использования, но они не так стандартизированы, как любительские маломощные сервомашинки.
Устройство сервопривода
Сервопривод (см. рисунок) состоит из электродвигателя, постоянного тока, приводящего в действие редуктор, уменьшающий скорость вращения двигателя и, в то же время увеличивающий крутящий момент на валу. Для контроля положения выходного вала он соединен с датчиком положения (как правило, это переменный резистор). Для управления мощностью и направлением, в котором поворачивается двигатель сервопривода, схема управления использует входной сигнал от датчика положения в сочетании с сигналом управления, задающим требуемое положение.
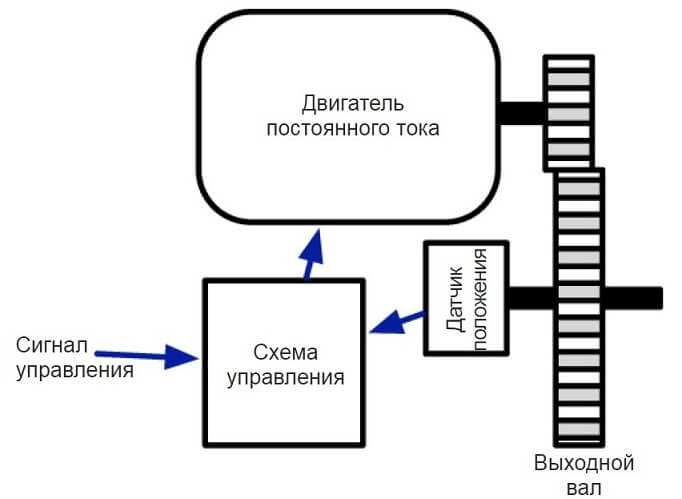
Блок управления, получив через сигнал управления величину желаемого положения вала, вычитает из него величину действительного его положения и вырабатывает «сигнал ошибки», который может быть положительным или отрицательным. Этот «сигнал ошибки» подается на питание двигателя, заставляя его изменить положение вала в нужном направлении. Чем больше разница между желаемым и действительным положением выходного вала, тем быстрее двигатель будет поворачиваться к желаемой позиции. Чем ближе к нулю становится значение ошибки (рассогласования), тем меньше становится питание двигателя.
Управление серводвигателем
Управляющий сигнал на серводвигатель — это не напряжение, как можно было бы ожидать, а сигнал широтно-импульсной модуляции (ШИМ). Этот сигнал является стандартным для всех любительских сервомашинок и выглядит так, как показано на следующем рисунке.
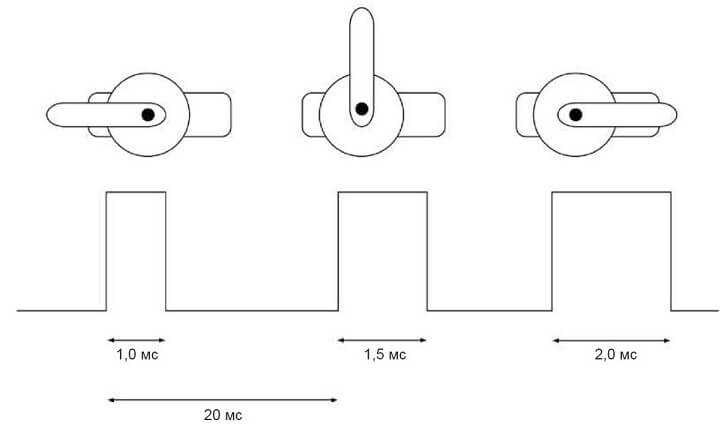
Серводвигатель ожидает прихода импульса управления каждые 20 мс. Импульс длительностью 1,5 мс установит серводвигатель в центральное положение, соответствующее повороту выходного вала на 90°. Более короткие импульсы в 1,0 мс установят выходной вал в начальное положение — 0°, а импульсы в 2,0 мс — крайнее положение — 180°. В реальности этот диапазон может быть немного меньше, чем полные 180°, без укорочения импульсов на одном конце и удлинения на другом. Не редкость и ситуация, когда для 0° нужен импульс 0,5 мс, а для 180° — 2,5 мс.
Назначение контактов сервомотора
Представлено на следующем рисунке. Я думаю, здесь все просто и понятно.
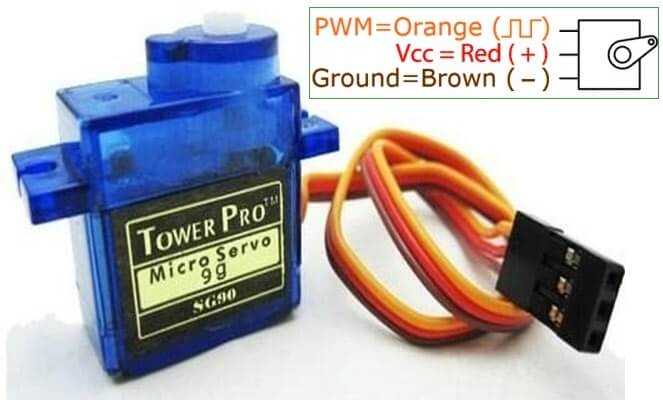
1. Red (красный) = Положительное напряжение питания (от 4.8V до 6V)
2. Brown (коричневый) = Ground (земля)
3. Orange (оранжевый) = Control Signal – управляющий сигнал (PWM Pin – контакт ШИМ)
Управление сервоприводом. Интерфейс управляющих сигналов
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
Чаще всего в хобби-сервах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс
Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Также стоит отметить, что это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов немного отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
На что ещё стоит обратить внимание, так это на путаницу в терминологии. Часто способ управления сервоприводами называют PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation)
Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя.
Сравнение с шаговым двигателем
Другим вариантом точного позиционирования приводимых элементов без датчика обратной связи является применение шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от положения репера (этой особенности обязан характерный шум шагового двигателя в дисководах 3,5″ и CD/DVD при попытках повторного чтения). При этом точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействующими между собой соответствующими полюсами статора и ротора шагового двигателя. Сигнал задания для соответствующей параметрической системы формирует система управления шаговым двигателем, активизирующая соответствующий полюс статора.
Так как датчик обычно контролирует приводимый элемент, электрический сервопривод имеет следующие преимущества перед шаговым двигателем
- не предъявляет особых требований к электродвигателю и редуктору — они могут быть практически любого нужного типа и мощности (а шаговые двигатели, как правило, маломощны и тихоходны);
- гарантирует максимальную точность, автоматически компенсируя: механические (люфты в приводе) или электронные сбои привода;
- постепенный износ привода, шаговому же двигателю для этого требуется периодическая юстировка;
- тепловое расширение привода (при работе или сезонное), это было одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечивая немедленное выявление отказа (выхода из строя) привода (по механической части или электронике);
большая возможная скорость перемещения элемента (у шагового двигателя наименьшая максимальная скорость по сравнению с другими типами электродвигателей);
затраты энергии пропорциональны сопротивлению элемента (на шаговый двигатель постоянно подаётся номинальное напряжение с запасом по возможной перегрузке);
Недостатки в сравнении с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- сложнее блок управления и логика его работы (требуется обработка результатов датчика и выбор управляющего воздействия, а в основе контроллера шагового двигателя — просто счётчик);
- проблема фиксирования: обычно решается постоянным притормаживанием перемещаемого элемента либо вала электродвигателя (что ведёт к потерям энергии) либо применение червячных/винтовых передач (усложнение конструкции) (в шаговом двигателе каждый шаг фиксируется самим двигателем).
- сервоприводы, как правило, дороже шаговых.
Сервопривод, однако, возможно использовать и на базе шагового двигателя или в дополнение к нему до некоторой степени совместив их достоинства и устранив конкуренцию между ними (сервопривод осуществляет грубое позиционирование в зону действия соответствующей параметрической системы шагового двигателя, а последняя осуществляет окончательное позиционирование при относительно большом моменте и фиксации положения).
ЗЫ:
Проблемы фиксирования никакой нет в сервоприводе в отличие от шагового. Высокоточное позиционирование и удержание в заданной позиции обеспечивается работой электрической машины в вентильном режиме, суть которого сводится к её работе в качестве источника силы. В зависимости от рассогласования положения (и других координат электропривода) формируется задание на силу. При этом несомненным преимуществом сервопривода является энергоэффективность: ток подается только в том необходимом для того объеме, чтобы удержать рабочий орган в заданном положении. В противоположность шаговому режиму, когда подается максимальное значение тока, определяющее угловую характеристику машины. Угловая характеристика машины аналогична при малых отклонениях механической пружине, которая пытается «притянуть» рабочий орган в нужную точку. В шаговом приводе чем больше рассогласование положения, тем больше сила при неизменном токе.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
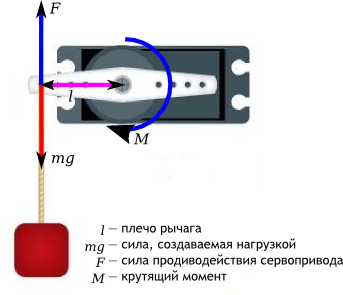
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
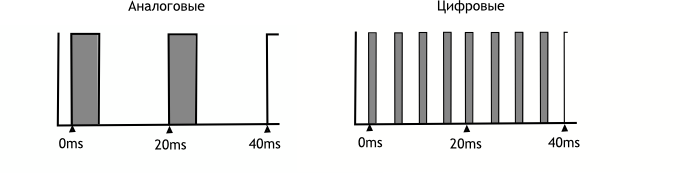
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.

Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Дополнительные возможности
Управление сервоприводами на Ардуино очень простое и мы можем использовать еще несколько интересных фишек.
Контроль точного времени импульса
Ардуино имеет встроенную функцию servo.write(градусы), которая упрощает управление сервомоторами. Однако не все сервоприводы соблюдают одинаковые тайминги для всех позиций. Обычно 1 миллисекунда означает 0 градусов, 1,5 миллисекунды – 90 градусов, и, конечно, 2 миллисекунды означают 180 градусов. Некоторые сервоприводы имеют меньший или больший диапазон.
Для лучшего контроля мы можем использовать функцию servo.writeMicroseconds(микросекунды), которая в качестве параметра принимает точное количество микросекунд. Помните, 1 миллисекунда равна 1000 мкс.
Несколько сервоприводов
Чтобы использовать более одного сервопривода в Ардуино нам нужно объявить несколько серво-объектов, прикрепить разные контакты к каждому из них и обратиться к каждому индивидуально. Итак, нам нужно объявить объекты – столько сколько нам нужно:
Затем нам нужно прикрепить каждый объект к сервомотору. Помните, что каждый сервопривод использует отдельный пин:
В конце концов, мы должны обращаться к каждому объекту индивидуально:
Подключение. Земля сервоприводов идёт на GND Arduino, питание на 5В или VIN (в зависимости от входа). И, в конце концов, каждый привод должен быть подключен к отдельному цифровому выводу.
Вопреки распространенному мнению, сервоприводами не нужно управлять через пины PWM – любой цифровой пин подойдет и будет работать.
Управление мышью
Чтобы управлять серво с помощью мыши, вот простой код:
Вам не обязательно использовать этот код, вы также можете отправлять команды на плату arduino с серийного монитора Arduino IDE. Позиция сервопривода от 0 до 180 – это команды 0 и 180 сек соответственно.
В основном этот код берет позицию mouseX (от 0 до 720) и делит на 4, чтобы получить угол для сервопривода (0-180). Наконец, значение выводится на последовательный порт с префиксом ‘s’.
Примечание: «s» на самом деле должен быть суффиксом, но поскольку это повторяется, это не имеет значения для результата.
Не забудьте сначала проверить с помощью println(Serial.list ()) COM-порт, который следует использовать.
Сервоприводы с непрерывным вращением
Существует специальные типы сервоприводов, обозначенные как сервоприводы непрерывного вращения. В то время как нормальный сервопривод переходит в определенную позицию в зависимости от входного сигнала, сервопривод непрерывного вращения вращается по часовой стрелке или против часовой стрелки со скоростью, пропорциональной сигналу.
Например, функция Servo1.write(0) заставит сервомотор вращаться против часовой стрелки на полной скорости. Функция Servo1.write(90) остановит двигатель, а Servo1.write(180) будет вращать вал по часовой стрелке на полной скорости.
Таким сервоприводам нашли несколько применений, но нужно понимать, что они достаточно медленные. Один из вариантов – микроволновая печь, когда есть необходимость в двигателе для вращения продуктов питания. Но будьте осторожны, микроволны – опасное дело!
Маленький сервопривод SG90. Размеры: 22.6 x 21.8 x 11.4 мм. Вполне подойдет для использования в радиоуправляемых моделях. Имеет три вывода: Плюс, Минус и Сигнал. Вращение ротора осуществляется на 180 градусов. Обеспечиваемый момент вращения при 4,8 В около 1,98 кг*см. Скорость вращения — 60 градусов за 0,14 сек. Рабочее напряжение от 3,5 до 7,2 Вольт. Подключение сервопривода SG90.
Обозначение проводов сервопривода SG90: Красный — Плюс питания Коричневый — Минус питания GND Желтый — Сигнал
Программа для Ардуино:
#include /подключение библиотеки для работы с сервоприводом Servo myservo;
void setup() <myservo.attach(5); /pin к которому подключим желтый сигнальный провод от SG90 > void loop() <myservo.write(0); /угол 0 градусов delay(2000); myservo.write(90); /угол 90 градусов delay(2000); myservo.write(180); /угол 180 градусов delay(2000);
for (int p=179; p>=1; p—) / медленно возвращаемся к нулю <myservo.write(p); delay(20); > >
Видео работы SG90
https://youtube.com/watch?v=eT5YSDvX88I
В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.






Интересует управление сервоприводом без микроконтроллера