Схема простого драйвера для униполярного шагового двигателя
Схема драйвера униполярного шагового двигателя, описанная в данной статье, реализует следующие задачи: • управление 4-фазовым униполярным шаговым двигателем. • обеспечивает плавную регулировку скорости вращения и изменение направления вращения. • выполняет функцию остановки двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.
Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью потенциометра PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.
Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.
Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы. Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.
Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
Рисунок печатной платы
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше. Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал
, чего вполне должно хватить для питания обмоток нашего моторчика.
Итак, схема:
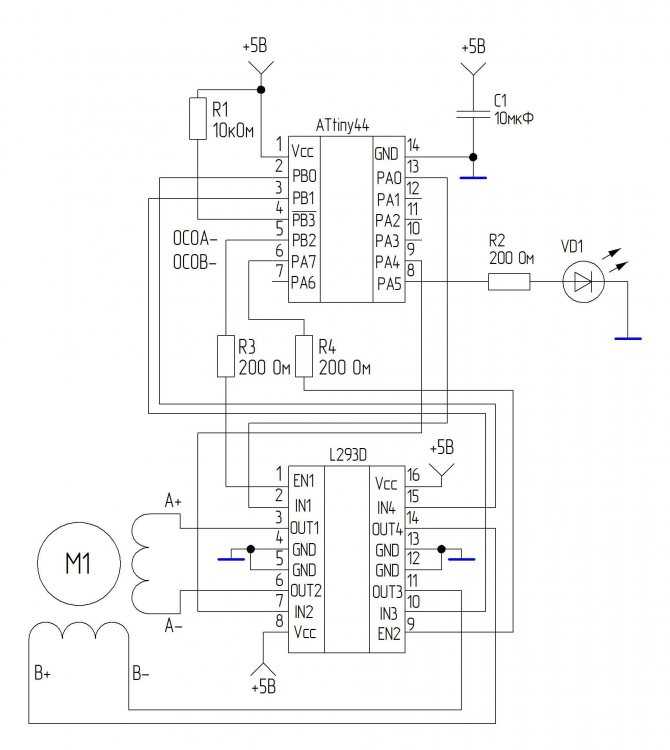
Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
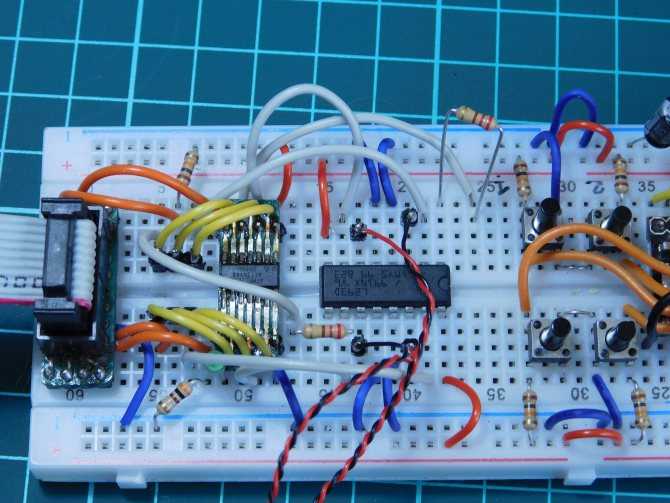
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан). Вот как выглядит собранная схема на макетной плате:
И вот так расположен наш подопытный:
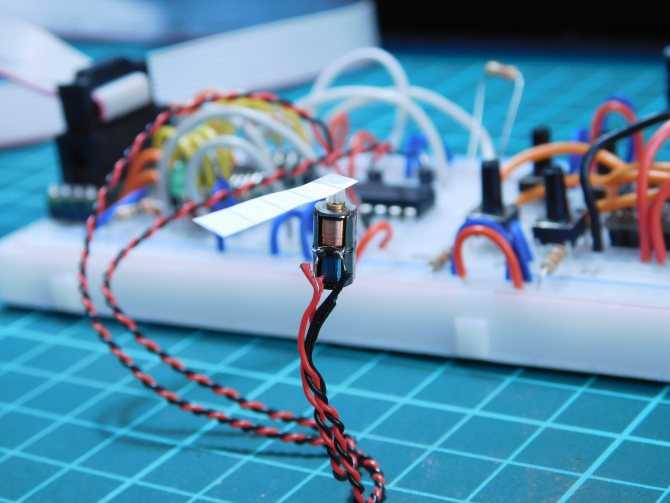
Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА
, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Попробуем реализовать первые два режима на микросхеме L293D а для микрошагового режима оставим специальный драйвер из второго эксперимента. Исходный код программы выглядит следующим образом:Исходный код в среде WinAVR #define F_CPU 8000000UL // указываем частоту в герцах // фьюзы необходимо выставить L: E2; H:DF; Ex:FF; // это будет частота 8МГц от внутреннего генератора с выключенным предделителем тактовый частоты (включен по умолчанию и равен
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая? Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае). Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает
Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Продолжаем…
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Итак, для начала сформулируем определение. Согласно Википедии: «Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора».
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
В приведенном выше определении было сказано «…вызывает дискретные угловые перемещения (шаги) ротора…» — это значит, что ротор шагового двигателя не вращается в обычном понимании, а поворачивается на какой-то определенный, «дискретный» угол. Этот угол называется шагом, отсюда и название «шаговый двигатель». Мне нравится еще одно название этих устройств — «двигатель с конечным числом положений ротора».
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
- Реактивные.
- С постоянными магнитами.
- Гибридные.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
- Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
- Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
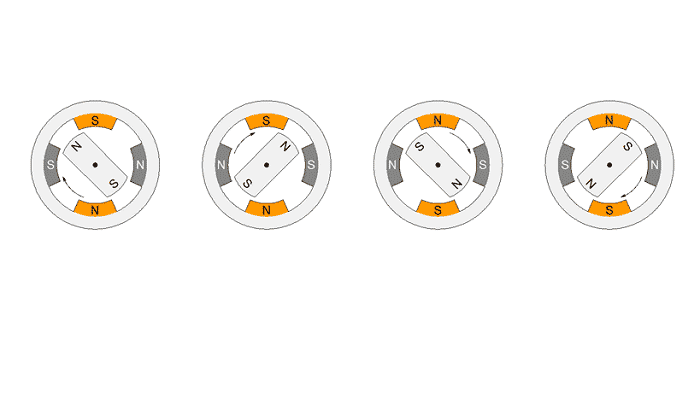
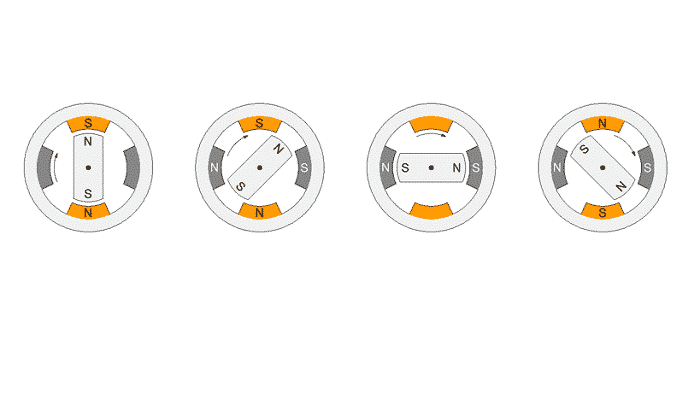
На анимациях ниже наглядно продемонстрировано
Полношаговое управление
Полушаговое управление
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Устройство и принцип работы
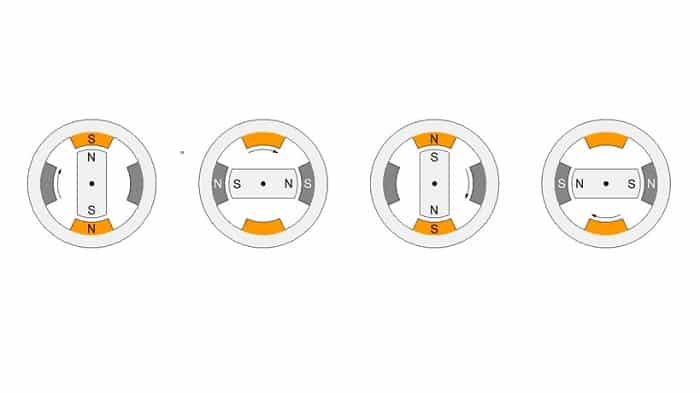
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управление
Полношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
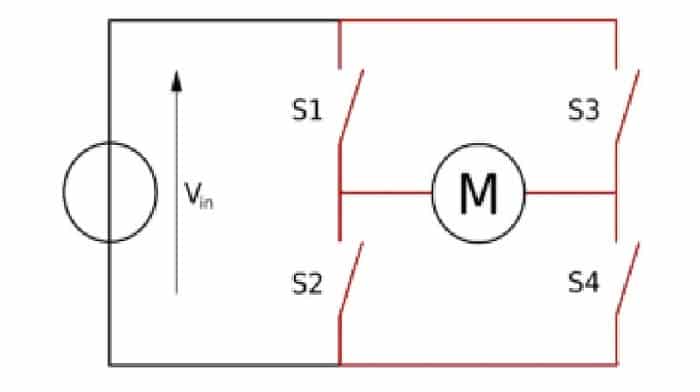 Схема Н-моста
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
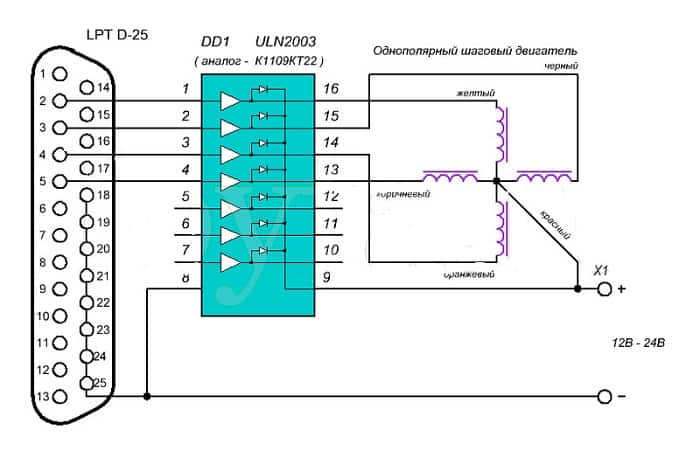 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
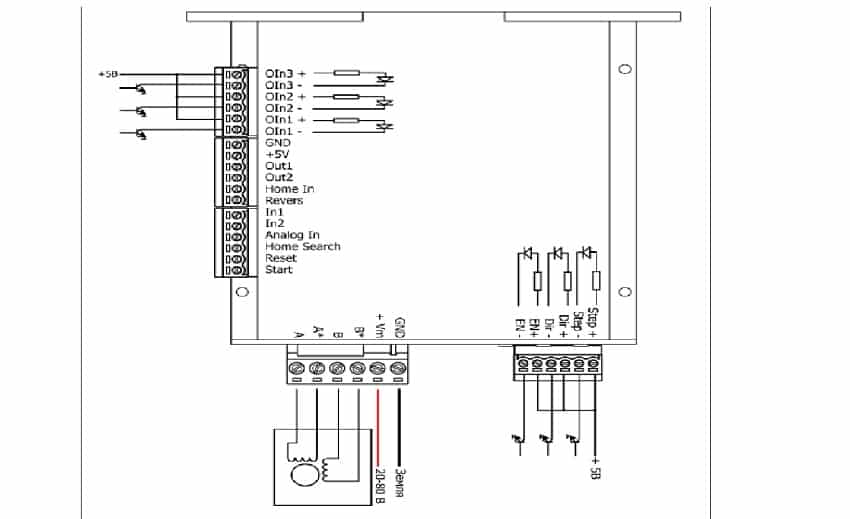 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером
Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр)
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
“>
Ограничение тока
Перед использованием драйвера нам нужно сделать небольшую настройку. Нам нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
Для этого есть два метода:
Способ 1:
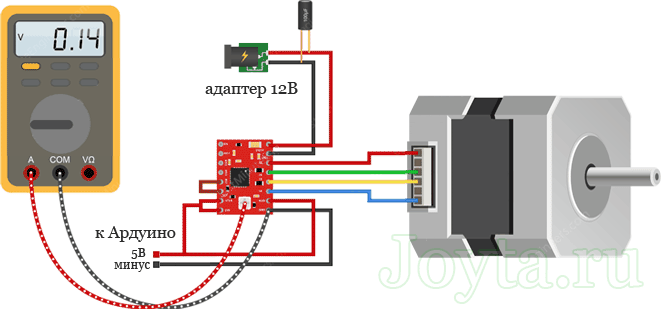
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов/об, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Во время регулировки измерьте напряжение Vref (один щуп мультиметра на минус питания, а другой к металлическому корпусу потенциометра).
- Отрегулируйте напряжение Vref по формуле:
ограничение тока = Vref x 2,5
Например, если ваш двигатель рассчитан на 350mA, вы должны установить опорное напряжение 0,14В.
Способ 2:
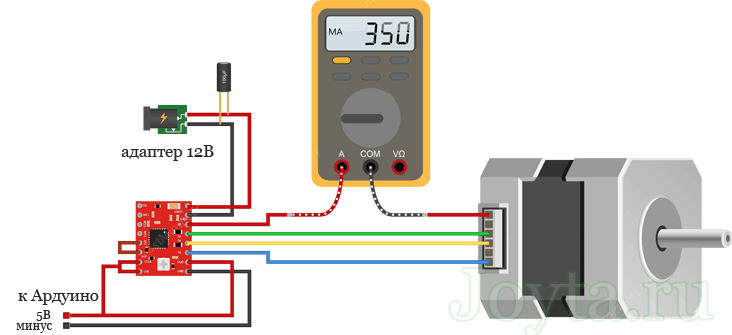
В данном случае мы собираемся установить ограничение тока, измеряя ток, протекающий через катушку двигателя.
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов / оборот, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP. Не оставляйте вход STEP висящим в воздухе, подключите его к источнику питания логики (5 В)
- Подключите амперметр последовательно с одной из катушек шагового двигателя и измерьте фактический ток.
- Возьмите небольшую отвертку и отрегулируйте потенциометр ограничения тока, пока не установите номинальный ток шагового двигателя.
Микрошаговый режим привода
Основное время работы ШД происходит в пошаговом или полушаговом режиме, а при пуске и остановке желательно использовать микрошаговый режим для точной фиксации. Пошаговый режим определён конструкцией и импульсным управлением. При микрошаговой работе на обмотки подаются синусоидальные напряжения с нужным сдвигом фаз.
Ротор фиксируется при определённом соотношении фаз токов в обмотках. Расчёт точки равновесия произвести по формуле x = S *pi/2*arctg a/b где:
- a — момент, создаваемый первой фазой и b — второй фазой;
- x — точка равновесия ротора или микрошаг в радианах;
- S — угол шага.
https://youtube.com/watch?v=jJQwmnyfw5k
 А также надо учитывать максимальную частоту управляющего сигнала, при которой нет потери или добавления лишнего шага в процессе работы. Она является основным показателем переходного режима шагового двигателя и обозначается в характеристиках, как частота приёмистости двигателя.
А также надо учитывать максимальную частоту управляющего сигнала, при которой нет потери или добавления лишнего шага в процессе работы. Она является основным показателем переходного режима шагового двигателя и обозначается в характеристиках, как частота приёмистости двигателя.
В процессе эксплуатации необходимо следить за чистотой вокруг привода и не допускать попадания металлической стружки, возможен выход из строя ШД. Найти способ защитить привод. Ремонт аналогичен ремонту коллекторного двигателя, требует аккуратности.
https://youtube.com/watch?v=dVPK28XmsLg
Как управлять шаговым двигателем через Arduino: схема подключения
Шаговый двигатель — один из основных компонентов роботехники, ЧПУ-станко, 3D-принетеров и других автоматических систем. В этой статье рассмотрим что это такое, как его подключить и как управлять шаговым двигателем с помощью Arduino.
На производстве и в быту при автоматической работе каких-либо механизмов часто требуется точное позиционирование рабочего органа или оснастки. Для этого могут использоваться серво приводы и шаговые двигатели. Эти два вида электропривода значительно отличаются, как по конструкции, так и по особенности работы и управления. В этой статье мы затронем тему работы с шаговыми двигателями с помощью Arduino и модуля для управления электродвигателями на базе ИМС ULN2003.
Исходный код программы (скетча)
Arduino
#include <Stepper.h>
#define STEPS 200
// Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver
Stepper stepper(STEPS, 2, 3); // Pin 2 connected to DIRECTION & Pin 3 connected to STEP Pin of Driver
#define motorInterfaceType 1
int Pval = 0;
int potVal = 0;
void setup() {
// Set the maximum speed in steps per second:
stepper.setSpeed(1000);
}
void loop() {
potVal = map(analogRead(A0),0,1024,0,500);
if (potVal>Pval)
stepper.step(10);
if (potVal<Pval)
stepper.step(-10);
Pval = potVal;
}
|
1 |
#include <Stepper.h> Stepperstepper(STEPS,2,3);// Pin 2 connected to DIRECTION & Pin 3 connected to STEP Pin of Driver #define motorInterfaceType 1 intPval=; intpotVal=; voidsetup(){ // Set the maximum speed in steps per second: stepper.setSpeed(1000); } voidloop(){ potVal=map(analogRead(A0),,1024,,500); if(potVal>Pval) stepper.step(10); if(potVal<Pval) stepper.step(-10); Pval=potVal; } |
Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:
Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.





