Контроллер шагового двигателя
Контроллер шагового двигателя в радиолюбительской литературе опубликовано много описаний устройств управления шаговыми двигателями, этот контроллер шагового двигателя, имеющее ряд отличий и достоинств. Предлагаемый контроллер биполярного шагового двигателя построен из небольшого числа легкодоступных дешёвых деталей, имеет маленький потребляемый ток и может быть адаптирован для применения в различных устройствах.
Применение двухполярного питания выходных электронных ключей дало возможность вдвое уменьшить их число и получить режим остановки двигателя, в котором через его обмотки не течёт ток. Управляющая программа обеспечивает фиксированную длительность рабочих импульсов при любой частоте шагов, что избавило ключевые транзисторы от излишнего нагрева. Использование для управления ключами оптронов даёт развязку по питанию, возможность независимого питания узла управления и ключей, коммутирующих обмотки двигателя.
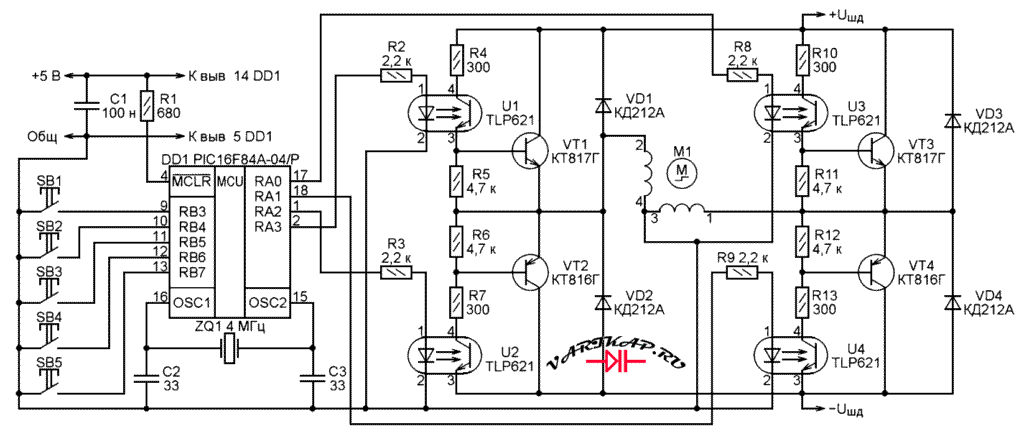
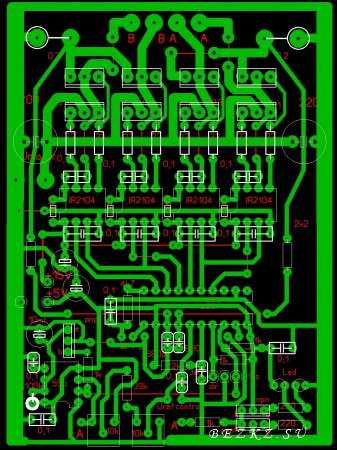
Схема контроллер шагового двигателя изображена на рисунке. Узел управления построен на микроконтроллере DD1 (PIC16F84A-04/P). Назначение кнопок управления следующее: SB1 — вращение по часовой стрелке; SB2 — вращение против часовой стрелки; SB3 — увеличение частоты шагов; SB4 — уменьшение частоты шагов; SB5 — стоп. Значения напряжения питания шагового двигателя +11шд и —11шд зависят от его типа, но не должны по абсолютному значению превышать 27 В — половины допустимого для фототранзисторов применённых оптронов напряжения коллектор—эмиттер. Чертёж печатной платы контроллер шагового двигателя и размещение деталей на ней показаны на рисунке размеры платы 76×53.
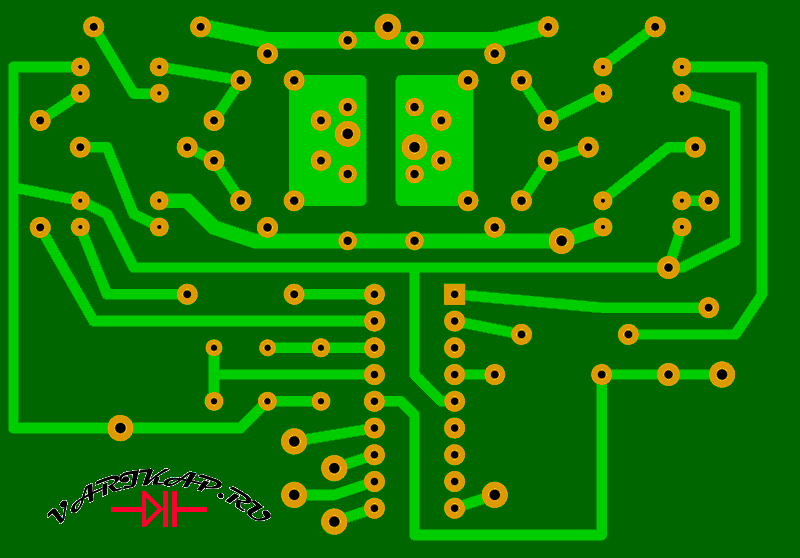
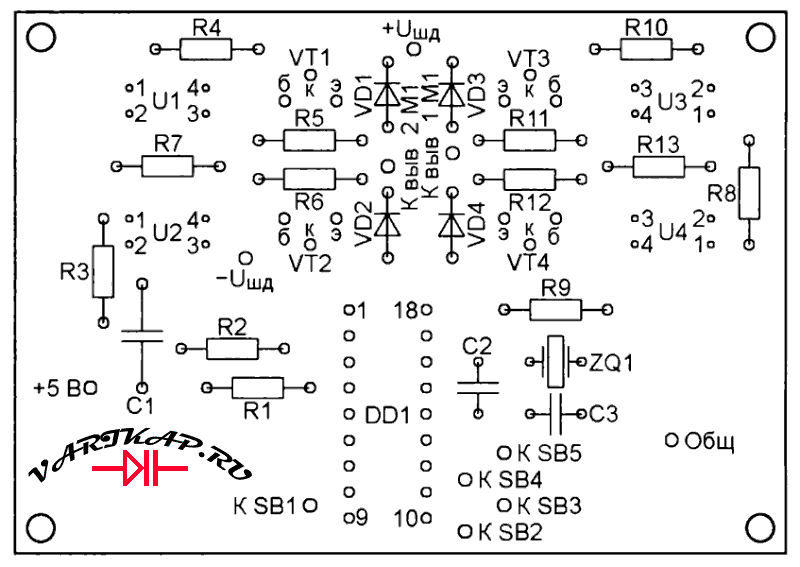
Для микроконтроллера на плате устанавливают панель, в которую его вставляют уже запрограммированным. Исходный текст программы микроконтроллера содержит все необходимые комментарии, и при необходимости её можно изменять, например, ввести полушаговый режим управления двигателем или, используя свободные порты микроконтроллера, добавить конечные выключатели для ограничения сектора вращения, или задавать нужное число шагов. Стоит отметить, что необходимая очерёдность открывания транзисторов VT1—VT4 реализована в программе с учётом трассировки печатной платы.
Правильно собранный контроллер шагового двигателя не требует налаживания. В нём в качестве VT1—VT4 можно использовать любые комплементарные пары транзисторов средней мощности, например, серий КТ814 и КТ815, КТ816 и КТ817, КТ972 и КТ973 или аналогичные импортные. Подходящие транзисторные оптроны можно найти в любом импульсном блоке питания, где их широко используют. Прошивку и печатную плату берем тут
Работа схемы
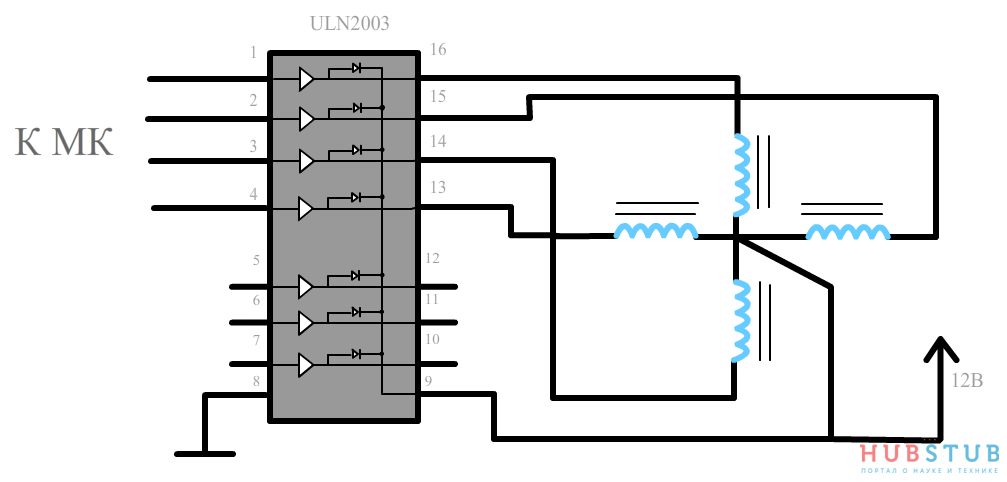
В следующих двух таблицах представлены схемы соединений входных и выходных контактов драйверов моторов ULN2003 или L293D с микроконтроллером AVR ATmega16 и шаговым электродвигателем.
| Atmega16 | ULN2003 | L293D |
| A0 | IN1(PIN1) | IN1(PIN2) |
| A1 | IN2(PIN2) | IN2(PIN7) |
| A2 | IN3(PIN3) | IN3(PIN10) |
| A3 | IN4(PIN4) | IN4(PIN15) |
| Шаговый двигатель | ULN2003 | L293D |
| Orange | OUT1(PIN16) | OUT1(PIN3) |
| Yellow | OUT2(PIN15) | OUT2(PIN6) |
| Pink | OUT3(PIN14) | OUT3(PIN11) |
| Blue | OUT4(PIN13) | OUT4(PIN14) |
Схема устройства с драйвером мотора ULN2003 приведена на следующем рисунке.
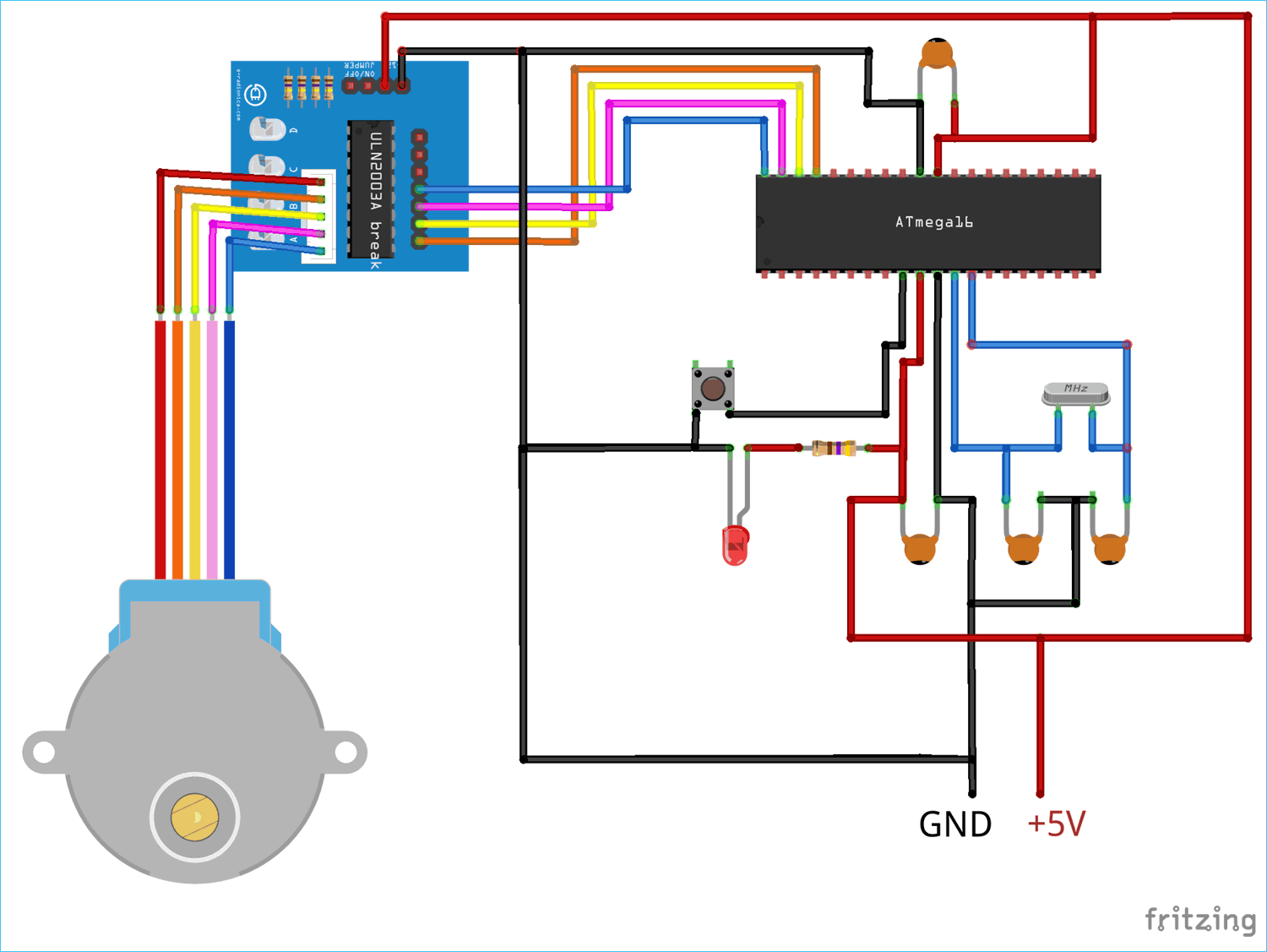
Схема этой же самой конструкции, но с драйвером мотора L293D, будет выглядеть следующим образом.
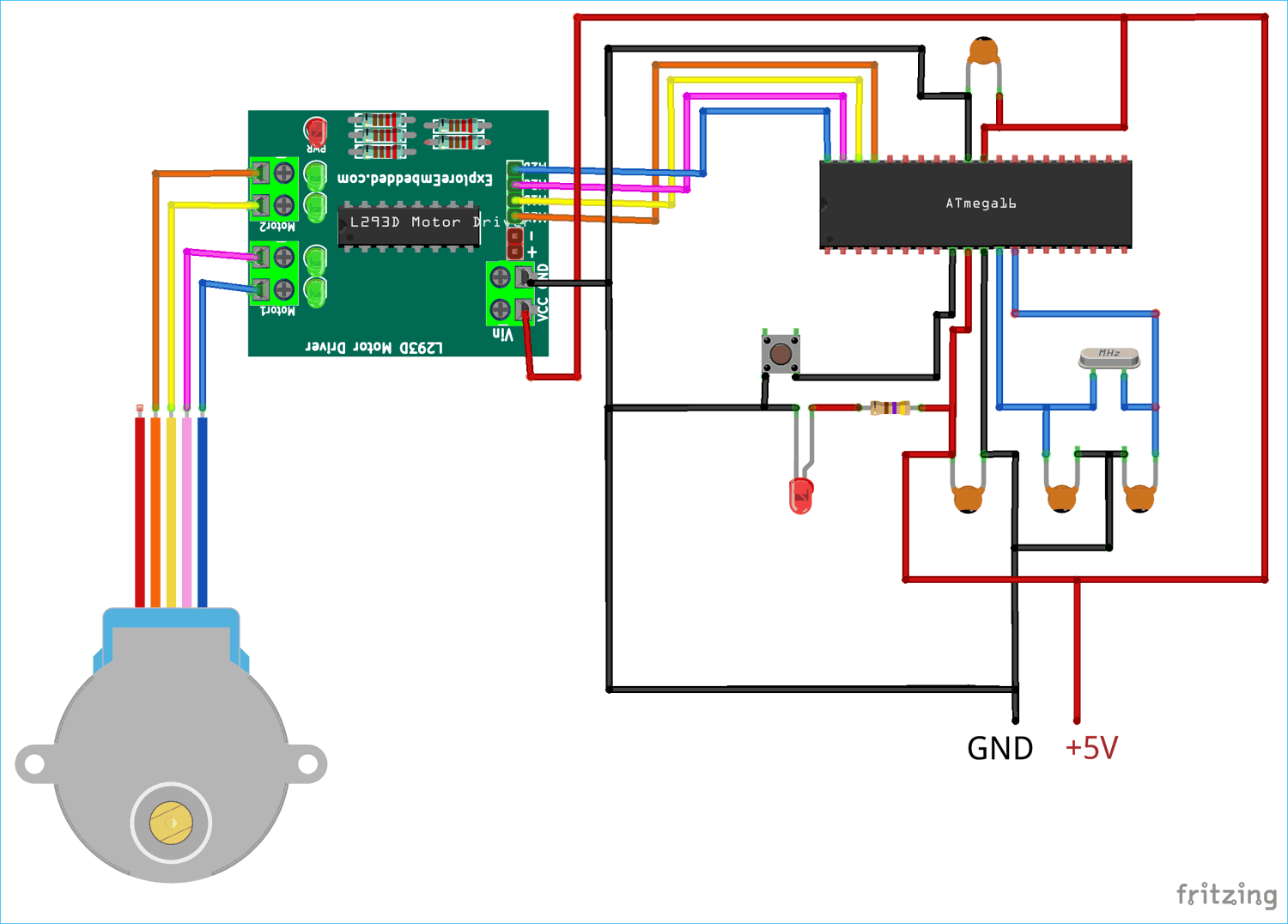
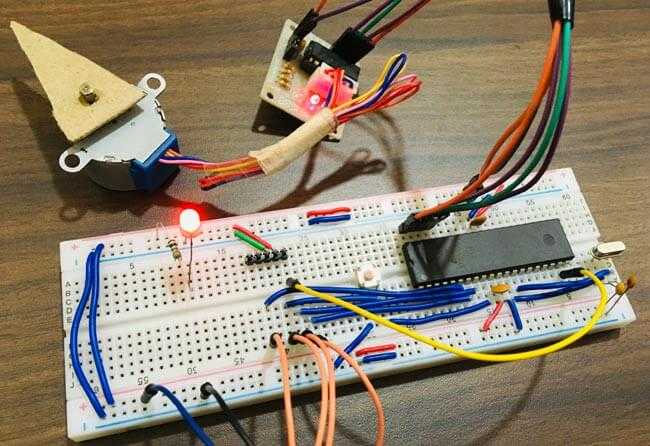
Внешний вид устройства с использованием ULN2003 приведен в начале статьи, а с использованием L293D он будет выглядеть следующим образом:
Соедините все компоненты устройства в соответствии с приведенной схемой соединений (одной из двух). Для управления шаговым двигателем мы будем использовать PORTA микроконтроллера Atmega16. К контактам шагового двигателя нет необходимости подключать питание – для управления им нам понадобятся только контакты его катушек (coil pins) – верно для ULN2003, для L293D немного по другому. Очень важен порядок контактов для того чтобы шаговый двигатель работал корректно. Для микросхемы ULN2003 используются четыре ее входа и четыре ее выхода – входы соединяются с контактами PORTA микроконтроллера, а выходы – с сигнальными контактами шагового двигателя. Также подсоедините кнопку к контакту сброса (Reset pin) чтобы иметь возможность осуществлять сброс микроконтроллера Atmega16 всегда, когда нам это понадобится. Подсоедините к микроконтроллеру кварцевый генератор. Все устройство должно быть запитано напряжением 5В.
PIC-контроллер управляет электродвигателем
В этой подборке рассказывается о двух конструкциях на PIC-контроллере, описанных на веб-сайте японского радиолюбителя Seiichi Inoue. Первая из них предназначена для управления частотой вращения электродвигателя постоянного тока, вторая — шагового электродвигателя.
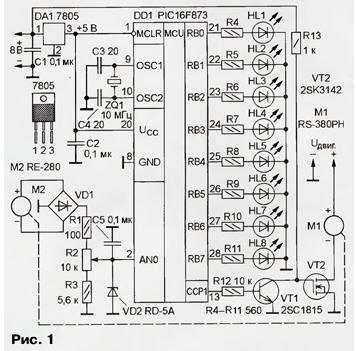
Устройство выполнено на микроконтроллере (МК) PIC16F873. Его тактовую частоту (10 МГц) задает кварцевый резонатор ZQ1. Питание на основной электродвигатель М1 подается через мощный полевой транзистор VT2, на затвор которого через согласующий каскад на транзисторе VT1 поступают прямоугольные импульсы с выхода ССР1 микроконтроллера
Частота импульсов постоянна, а скважность можно изменять, регулируя, таким образом, частоту вращения ротора двигателя
Вал электродвигателя М1 механически (через зубчатую двухступенчатую передачу 1:1) связан со вторым электродвигателем, который используется в качестве генератора. Вырабатываемое им напряжение через диодный мост VD1 и делитель напряжения R1 — R3 поступает на вход AN0 аналого-цифрового преобразователя, входящего в состав МК. Стабилитрон VD2 с напряжением стабилизации 5 В защищает этот вход от повреждения, конденсатор С5 сглаживает пульсации выпрямленного напряжения.
Требуемую частоту вращения устанавливают переменным резистором R2 с функциональной характеристикой А.
Рост напряжения, поступающего на вход AN0, свидетельствует о том, что частота вращения вала двигателя увеличивается. В ответ на это МК уменьшает длительность импульсов на выходе ССР1, и частота вращения возвращается к прежнему значению. При уменьшении напряжения, вырабатываемого двигателем-генератором, длительность импульсов возрастает и частота вращения повышается.
Линейка светодиодов HL1 — HL8 позволяет визуально контролировать частоту вращения вала двигателя: число светящихся светодиодов растет с ее увеличением.
Питается устройство стабилизированным напряжением 5 В, снимаемым с выхода интегрального стабилизатора DA1. На двигатель М1 поступает нестабилизированное напряжение от отдельного источника. Регулятор собран на макетной плате размерами 70×45 мм.
Устройства управления шаговым двигателем обычно содержат сдвиговые регистры, формирующие необходимую последовательность импульсов, поступающих на обмотки.
Предлагаемое устройство на PIC-контроллере позволяет также изменять направление и регулировать частоту вращения ротора. Описание конструкции, чертеж монтажной платы и комментированные исходные коды программы микроконтроллера размещены по этой ссылке
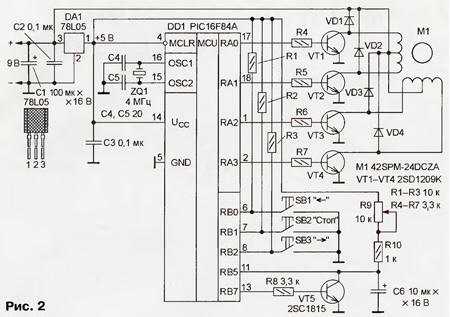
Основной служит МК PIC16F84A. Тактовую частоту (4 МГц) задает кварцевый резонатор ZQ1. На элементах R8-R10, С6 и транзисторе VT5 собран генератор, частоту которого можно плавно изменять переменным резистором R9 с функциональной характеристикой А. Напряжение с конденсатора С6 поступает на вход RB5 МК DD1. После того как оно превысит пороговое, на выходе RB7 появляется напряжение высокого уровня. Открывшийся транзистор VT5 разряжает конденсатор, после чего цикл повторяется.
При перемещении движка резистора R9 из одного крайнего положения в другое частота вращения двигателя М1 изменяется от 27 до 128 мин-1. Следует учесть, что при увеличении частоты вращения снижается момент на валу двигателя. Устройство не имеет обратной связи, поэтому частота вращения зависит как от сопротивления введенной части резистора R9, так и от нагрузки на валу.
Выходы RA0 — RA3 МК через ключи, выполненные на составных транзисторах VT1 — VT4, коммутируют напряжения на обмотках шагового двигателя. Диоды VD1 — VD4 защищают транзисторы от пробоя импульсами напряжения, возникающими в момент их закрывания.
К первым трем разрядам порта RB (RB0 — RB2) МК подключены кнопки SB1 — SB3, с помощью которых изменяют направление вращения вала двигателя и останавливают его.
Стабилизаторы 78L05 и 7805 заменимы отечественными КР142ЕН5А (В), транзистор 2SC1815 — любым из серии КТ3102, стабилитрон RD-5A — отечественным КС147А. Транзисторы VT1-VT4 (см. рис. 2) должны выдерживать ток обмоток двигатели и иметь коэффициент передачи тока базы около 4000. Выпрямительный мост VD1 (см. рис. 1) — КЦ407А или собранный из маломощных кремниевых диодов. Светодиоды HL1 — HL8 — любые из серии АЛ307.
| C этой схемой также часто просматривают: |
ГЕНЕРАТОР ИМПУЛЬСОВ НА PIC-КОНТРОЛЛЕРЕ Контроллер шагового двигателя Как сделать простой программатор для PIC-ов и AVR-ов Универсальный велосипедный путевой прибор на PIC контроллере Передача отладочной информации из PIC-контроллера через COM-порт PIC-контроллер в автомобильных часах LCD-термометр на микроконтроллере DDS генератор на микроконтроллере Светодиодные «наперстки» на микроконтроллере
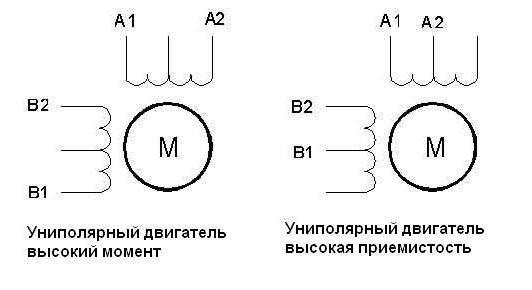
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей. Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений. Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Самый простой способ изменить направление — поменять местами одну пару проводов катушки (поменять местами, например, B + с B — и B — с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов — использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей — простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
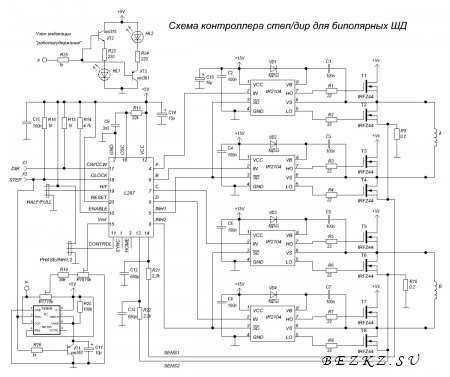
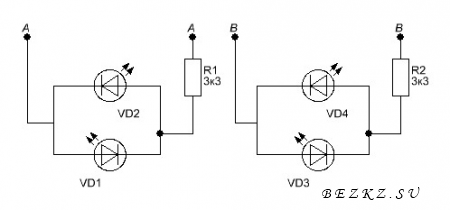
АВТОНОМНЫЙ КОНТРОЛЛЕР БИПОЛЯРНОГО ШАГОВОГО ДВИГАТЕЛЯ.
Для проверки и автономного использования шаговых двигателей был разработан автономный контроллер униполярных шаговых двигателей, однако он может работать далеко не со всеми двигателями, а только с теми, что имеют средние выводы обмоток, 5 ,6 и 8 выводные двигатели.
Для запуска 4 выводные двигателей по схеме биполярного включения был разработан новый контроллер . Он позволяет запускать 4, 6 и 8 выводные двигатели с большим КПД.
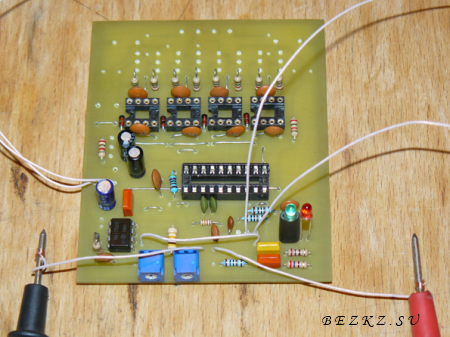
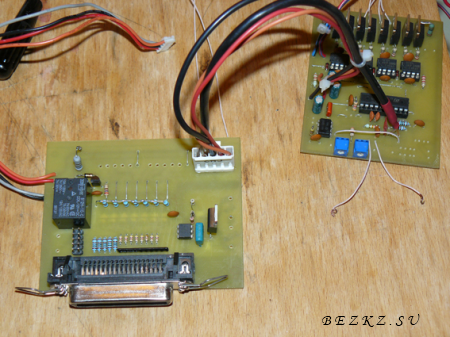
Фотография собранного контролера. Транзисторы отогнуты в разные стороны для крепления двух раздельных пластинчатых радиаторов.
Фотография со стороны проводников
Схема собрана на микроконтроллере PIC12F629 и дискретных элементах в драйвере ШД. Монтаж выполнен частично с использованием smd элементов. Выходные транзисторы Дарлингтона уже содержат диоды для защиты от индуктивной составляющей обмоток ШД.
При использованных деталях допускается напряжение питания ШД до 40 вольт и током обмотки до 5 ампер (паспортно). Есть прошивки для работы в полушаговом, шаговом однофазном и шаговом двухфазном режимах.
https://youtube.com/watch?v=exLKU7PiecU
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Управление биполярным шаговым двигателем без использования драйвера
Как-то раз мне захотелось поэксперементировать с шаговыми двигателями. С униполярным двигателем всё очень просто, достаточно полумоста на очень бюджетной микросхеме ULN2003 или ULN2803. А вот с биполярным двигателем всё гораздо сложнее. Он имеет минимум две обмотки, на каждом конце которых полярность питания должна меняться на противоположную. Кто-то скажет «зачем изобретать велосипед? Купи драйвер на L239 и радуйся жизни», может быть это и правильно, но мы же не ищем лёгких путей, да и что-нибудь спаять руки чешутся (а драйверы были куплены, просто они ещё ехали из Китая). Немного покопавшись в интернете, я заинтересовался такой штукой, как H-мост.
Данная схема может подавать на каждый конец обмотки и плюс и минус, в зависимости от того на затвор верхнего или нижнего транзистора плеча моста подать управляющее напряжение.
Так как у биполярного двигателя две обмотки, то нам понадобится два H-моста. Тогда для управления двумя мостами у нас получается восемь управляющих проводов (на затворы каждого транзистора). Это очень неудобно, потому что, во первых, нужно много проводов цеплять к управляющему микроконтроллеру, а во вторых, если подать управляющий сигнал одновременно на верхний и на нижний транзисторы одного плеча моста, то мы получим короткое замыкание и просто сожжём два транзистора. Поэтому я решил сделать одну хитрость: затворы нижних транзисторов каждого плеча (они у нас коммутируют минус к обмотке мотора) необходимо подключить через инвертор (в данном случае логический элемент «не»), а затворы верхних транзисторов — на вход того же инвертора. Таким образом мы получаем уже четыре управляющих сигнала (A, B, C ,D).
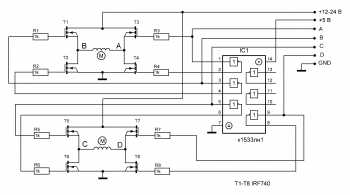
В итоге, если мы подаём на любую линию управления логическую единицу (ТТЛ), то у нас откроется верхний транзистор плеча, а на затвор нижнего пойдёт логический нуль и он будет закрыт. А если подать на ту же линию логический нуль , то верхний транзистор будет закрыт, а на затвор нижнего будет подана логическая единица (с выхода инвертора), и конец обмотки будет подключён к минусу. С теорией покончено.
Теперь подключаем нашу схему к arduino (или просто микроконтроллеру): линии A,B,C,D — к любому свободному пину, так же же подключаем минус и плюс 5 вольт от платы контроллера. Сами мосты запитываем от отдельного блока питания (у меня был не стабилизированный на 15 вольт).
Осталось написать программу управления
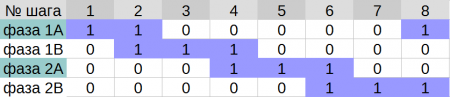
Будем управлять двигателем в полушаговом режиме (8 шажков). В моей программе написаны три функции: forward — будет крутить двигатель в одну сторону, backward — в обратную, stope — остановка. Функции запускаются с помощью терминала путём отправки символов (f,b и s соответственно). Переменная dl служит для управления скоростью вращения двигателя. Так как программа выполняется по кругу, то двигатель вращается постоянно. По аналогии можно добавить подпрограммы для одного шага или нужного количества шагов.
Внешний вид готового устройства:

Как видно из фотографии, мосты собраны из разных транзисторов (в верхних плечах пары ceb703al и 76129s выпаянные из старых материнок, в нижних плечах irf640 и irf610), так как восемь одинаковых у меня просто не было. Тем не менее схема вполне работоспособна. Так же на фото заметна пара «соплей» — перемычек — как всегда ошибки при рисовании платы.
И в конце статьи — демонстрационное видео работы устройства.
https://youtube.com/watch?v=wGRTH_a9S6Q
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.

В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером
Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр)
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
“>
Принцип работы биполярного шагового электродвигателя
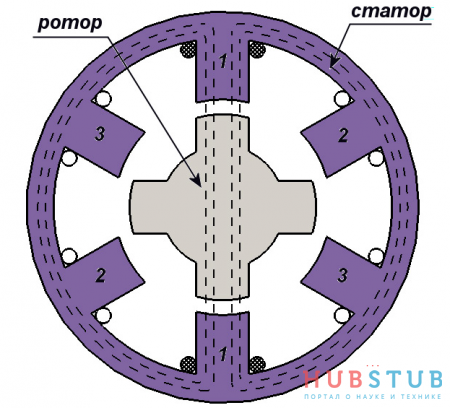
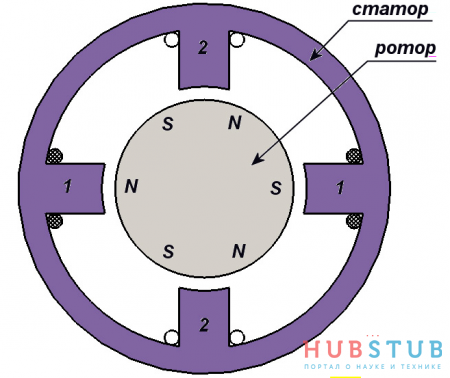
На следующем рисунке показана схема работы биполярного шагового электродвигателя. О другом типе шаговых электродвигателей — униполярных – можно прочитать в соответствующих источниках. В биполярном шаговом двигателе, как правило, имеются четыре катушки. Катушки, расположенные одна против другой, соединены так, что работают синхронно.Все катушки расположены на неподвижном статоре двигателя, а значит, нет необходимости во вращающемся коллекторе и щетках, как у двигателей постоянного тока.
Ротор шагового электродвигателя выполнен в форме намагниченных зубцов с чередующимися северным (С) и южным (Ю) полюсами (зубцов на роторе обычно гораздо больше, чем показано на представленном рисунке). Каждую катушку можно подключить так, что она будет намагничена или как северный полюс, или как южный, — в зависимости от направления тока в катушке. Катушки 1 и 3 работают совместно так, что когда катушка 1 будет южным полюсом, катушка 3 также будет южным полюсом. То же самое относится и к катушкам 2 и 4.
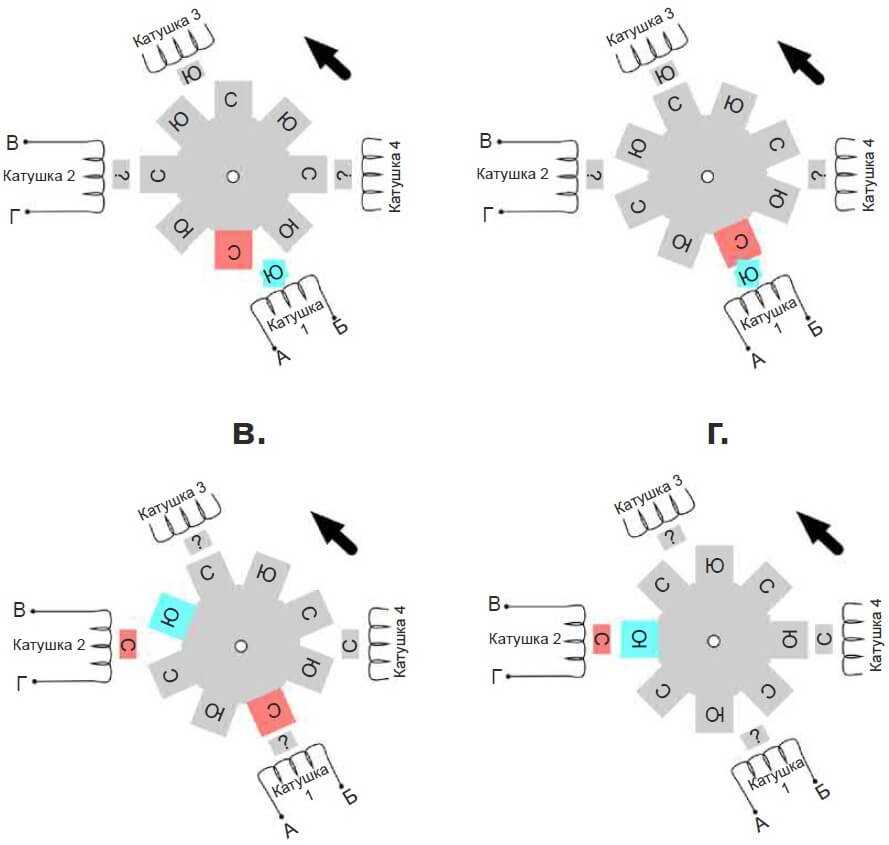
Начнем с варианта рисунка под буквой «а» — когда катушка 1 , а значит, и катушка 3 запитаны так, что становятся южными полюсами (Ю), вследствие того, что разноименные полюса притягиваются, а одноименные отталкиваются, ротор поворачивается против часовой стрелки до тех пор, пока ближайшие зубцы ротора с намагниченностью северного полюса (С) не поравняются с катушками 1 и 3 (как показано на «б»).Чтобы продолжить вращение против часовой стрелки, на следующем шаге (рисунок «в») необходимо подать ток в катушки 2 и 4 так, чтобы они стали северными полюсами (С). Тогда ближайшие зубцы ротора с намагниченностью Ю подтянутся к катушкам 2 и 4 (рисунок «г»).
Каждое такое действие проворачивает ротор электродвигателя на один шаг. Для продолжения вращения против часовой стрелки в катушке 1 снова нужно создать намагниченность С (см. представленную таблицу).
Таблица 1. Последовательность действий при вращении шагового двигателя против часовой стрелки
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | — |
| — | С |
| С | — |
| — | Ю |
Прочерки в графах таблицы 1 указывают на то, что катушка в этот момент не оказывает влияния на вращение ротора и должна быть обесточена. Чтобы усилить момент вращения двигателя, на эти обесточенные катушки можно подать такой ток, чтобы полярность их намагниченности совпадала с полярностью стоящего под ней зубца ротора (таблица 2).
Таблица 2. Уточненная последовательность переключения катушек при вращении шагового двигателя
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | С |
| С | С |
| С | Ю |
| Ю | Ю |
Для изменения направления вращения ротора нужно всего лишь изменить порядок переключения катушек, указанный в таблице 2, на обратный.
Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом — то есть максимально мощный и экономичный двигатель.Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STH38-1684
Управление шаговым двигателем с помощью микроконтроллера.
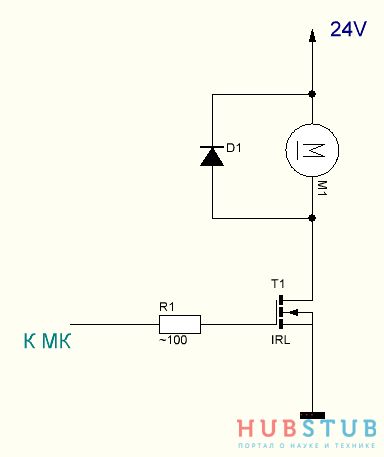
После первого запуска стало понятно, что хотели получить одно, а получили другое, после того как транзистор закрывался, двигатель продолжал вращаться ещё не один оборот, оно и понятно, для того чтобы вал остановился, энергия, которую он накопил пока вращался, должна быть израсходована.
Вот мы и подошли к одному из основных преимуществ шагового двигателя — возможность точного позиционирования.
Шаговые двигатели бывают трёх основных типов:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
В двигателях с переменным магнитным сопротивлением, ротор изготовлен из магнитомягкого материала, то есть материала, который способен быстро намагничиваться и быстро терять магнитные свойства при снятии магнитного поля. Вращающий момент создаётся магнитными потоками статора, причём ротор всегда становится так, чтобы магнитный поток создаваемый статором замкнулся. Для того чтобы ротор повернулся надо, выключить ток в одной обмотке и включить в другой обмотке.
Гибридные двигатели обладают преимуществами вышеописанных двигателей и лучшими характеристиками: меньшей величиной шага, большим моментом, большей скоростью и как следствие стоят дороже.
Перейдём к практике, для эксперимента возьмём шаговый двигатель MITSUMI M42SP-5 с шагом 7.5°, изображённый на картинке.

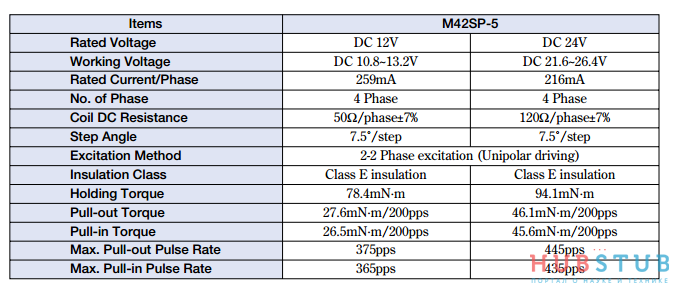
Из таблицы понятно, что такие двигатели бывают двух типов:
- 12 вольтовые с сопротивлением обмотки 50 Ом
- 24 вольтовые с сопротивлением обмотки 120 Ом
Схема двигателя изображена на картинке ниже.
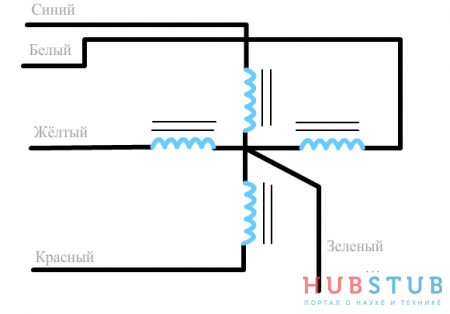
Из двигателя выходит 5 проводов: 4 фазы и один общий. Общий провод можно найти с помощью мультиметра, сопротивление между ним и оставшимися 4 проводами равно сопротивлению фазы, в нашем случае 50 Ом.
Как писалось выше, необходим посредник, который примет от микроконтроллера 20mA и отдаст двигателю 259mA. Можно как раньше взять полевой транзистор, но есть одно, но фаз здесь целых четыре штуки и для этого случая есть более простое решение — это использовать микросхему ULN2003.
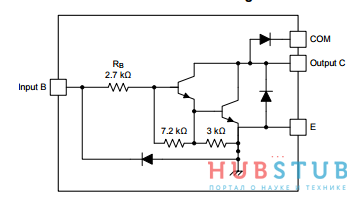
Транзистор Дарлингтона или пара Дарлингтона, представляет собой два соединённых транзистора, его отличительной особенностью является высокий коэффициент усиления, который равен произведению коэффициентов усиления каждого из транзисторов(βс = β1 ∙ β2).
Вращать двигатель можно, подавая питание по очереди на обмотки, при этом в любой момент времени включена лишь одна обмотка, в этом случае двигатель будет работать в режиме шага, то есть при одном переключении обмоток будет поворачиваться на 7.5°.
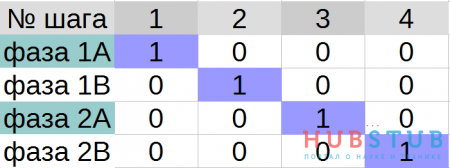
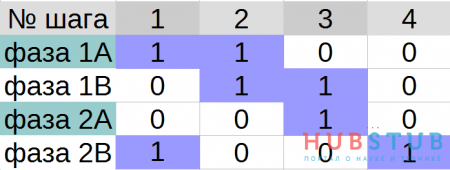
Для удобства управления можно создать массив в котором номер элемента массива будет обозначать номер шага, а значение элемента массива — какие обмотки должны быть включены.
Если передавать последовательно элементы этого массива в порт микроконтроллера, двигатель будет работать в режиме полушага, если через один — в режиме полного шага. Для передачи значений в порт удобно использовать прерывание от таймера по переполнению, таким образом, изменяя время между прерываниями, мы можем регулировать скорость вращения двигателя.
Драйвер шагового двигателя pic16f84a
Короче мы выставили 0,2В.

Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:

Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:

Либо на 16 ноге, он такой:
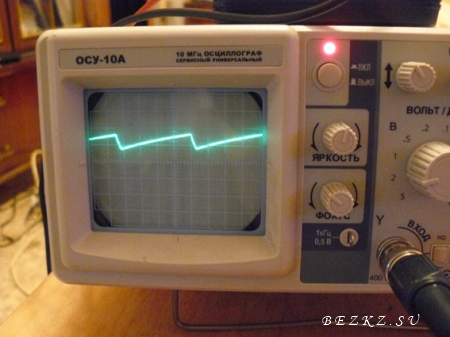
Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ
Это важно. Даже если шим не запустится, логическая часть 297 будет работать, т.е
при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы
Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом
Так что важно убедиться в запуске генератора микросхемы
Данное описание не претендует на бестселлер, оно может дополняться и критиковаться но только по существу…
Проверяем L297 с помощью ТМ2
Скачать (cкачиваний: 1274) схему и печатку от delta24
Обсуждение в закрытой части форума (только для постоянных пользователей, для получения доступа обращайтесь к delta24 )





