Спасибо, эволюция
Чтобы понять, как устроено дело Игоря, нужно вернуться в прошлое. Более 30 лет он занимался изготовлением паркета. И достиг профессионального потолка. Работал даже в богатейшей стране Катар: в одном из дворцов государства есть паркет, сделанный белорусом. Три с половиной года назад Игорь приобрел ЧПУ-станок с единственной целью: вытачивать на паркете сложные рисунки. Как тогда, так и сегодня станок начального уровня стоит почти 19 тысяч рублей.
Предприниматель обратился к поставщику и предложил выкупить его без кредитов и рассрочек. Тот подумал и через неделю согласился, так как у него он простаивал.
— Я нигде не учился работать с ЧПУ-станком, на курсы не ходил. Пришлось осваивать все самостоятельно, методом проб и ошибок, по видеоурокам в интернете. Вообще, если отлично знаешь дело, которым занимаешься, то никто не сможет тебя обмануть. Например, раньше с меня брали 80 рублей за то, что делается 7—8 минут и стоит 5 рублей. Я даже не представлял все возможности инструмента. Постепенно углубляясь в них, дело так увлекло, что от паркета почти отказался. Изготавливаю его только самым близким знакомым и друзьям по просьбам,
— рассказывает Игорь.
Чаще всего он работает с заказами на те вещи, которые востребованы: столешницы, перегородки, шкафчики, фасады кухонь. Они и приносят львиную долю прибыли. Но Игорь тут же демонстрирует резную картину из МДФ с логотипом World of Tanks. Компания заказывала их разных размеров. А недавно заказали картину 1,8х1,2 метра своему начальнику, чтобы разместить в его приемной. Работа, на которую ушло 15 дней, обошлась в 4000 рублей.
На изготовление изделия уходит от 15 минут до месяца
https://youtube.com/watch?v=MigxlNtWdLU
Настройка тока DRV8825.
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя, и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
где,
Current Limit — номинальный ток двигателя.
Для примера рассмотрим двигатель NEMA 17 17HS4401 с током 1,7 А.
Vref = 1,7 / 2 = 0,85 В.
Осталось только настроить, берем отвертку и вольтметр, плюсовый щуп вольтметра устанавливаем на потенциометр, а щуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя DRV8825 к Arduino UNO.
Подключим двигатель DRV8825 к Arduino UNO по схеме.
Для этого подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигателя к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. А контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ к контактам питания двигателя. В противном случае, при скачке напряжения модуль может выйти из строя.
Скетч вращения шагового двигателя NEMA 17, драйвер DRV8825.
Как уже было упомянуто выше, драйвер DRV8825 заменим драйвером A4988, поэтому и код вращения двигателем можно взять из предыдущей статьи: Драйвер шагового двигателя A4988. Но для увеличения кругозора сегодня будем использовать код вращения двигателя nema 17 без использования библиотеки.
const int dirPin = 2;
const int stepPin = 3;
const int stepsPerRevolution = 200;
void setup()
{
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop()
{
digitalWrite(dirPin, HIGH); // Установка вращения по часовой стрелки
for(int x = 0; x > stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
digitalWrite(dirPin, LOW); // Установка вращения против часовой стрелки
for(int x = 0; x < stepsPerRevolution; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
}
Описание скетча:
Для работы данного скетча, не требуется никаких библиотек. Программа начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR. Так же указываем stepsPerRevolution количество шагов на оборот.
В функции void setup() указываем управляющие контакты как выход.
В основной функции void loop(), вращаем двигатель по часовой стрелке, затем против, с разной скоростью.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
Распиновку и как подключать модуль драйвера DRV8825 будем рассматривать в следующей статье.
Использование драйвера DRV8825 с CNC shield v3.
Драйвер DRV8825 можно установить на CNC shield v3. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки. Более подробно CNC shield v3 будем рассматривать в следующих статьях.
Вывод можно сделать следующий. Драйвер DRV8825 обладает рядом преимуществ перед драйвером A4988. А также, при использовании драйвера шагового двигателя DRV8825, меньше шума от шаговых двигателей. Это актуально при сборке лазерного гравера, 3D принтера. Когда при работе главный источник шума — это механика и гул шаговых двигателей.
Понравился статья Драйвер шагового двигателя DRV8825? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу , в группу на .
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
Скачивая материал, я соглашаюсь с
Правилами скачивания и использования материалов.
| drv8825-datasheet.pdf | 743 Kb | 329 | Скачать |
Что предпочесть и с чего начать?

JG Maker Magic подойдёт для печати большинством популярных материалов, доступных в прутке, исключая деревосодержащие и поликомпонентные.
Также возможно доработка устройства автоматическим датчиком уровня для калибровки печатной головки относительно стола. Не лишним будет установка второй оси для перемещения стола.
Впрочем, всё это может потребоваться нескоро: принтер готов к работе даже с заводскими настройками, поменяв их уже после того, как на практике будут освоены основные понятия процесса.
Среди альтернатив стоит отметить уже упомянутый Tronxy XY-2 Pro с цветным экраном управления, бОльшей областью печати и наличием индукционного датчика калибровки.

Взамен придётся пожертвовать точностью (0.05 мм у Magic против 0.1 мм Tronxy). Tronxy собирается дольше, поскольку вся рама идёт в разборе. Теоретически, это может привести к проблемам при печати. Прошлый опыт с аналогичным устройством говорит сам за себя.
Субъективно, базовая прошивка Magic поинтереснее, как и стабильность печати.
Тем не менее, для старта в 3D-печати подойдёт любой быстрособираемый принтер на металлической раме и более-менее стандартными «мозгами».

Желательно если у него будет подвижный стол с автоподогревом, датчик смены филамента и концевой выключатель для определения уровня.
Так что стоимость входа в новую профессию оказывается куда ниже, чем может показаться. А между тем, за ней будущее: конструктивно ЧПУ-станки и профессиональные устройства для 3D-печати отличаются незначительно.
P.S. Среди наших читателей есть те, кто использует 3D-печать на работе или в виде хобби?

iPhones.ru
То, что надо начинающему.
Николай Маслов
Авиаинженер, спец по Kanban, радиофизик и музыкант. Рассказываю об технике простым языком, ищу лайфхаки и новые тренды.
Установка электроники на лазерный гравировальный станок, и подключение.

После проведения всех тестов, можно установить электронику на ЧПУ станок и провести первый пуск.
Схема подключения Arduino UNO + CNC shield v3 + A 4988 + ttl laser driver.
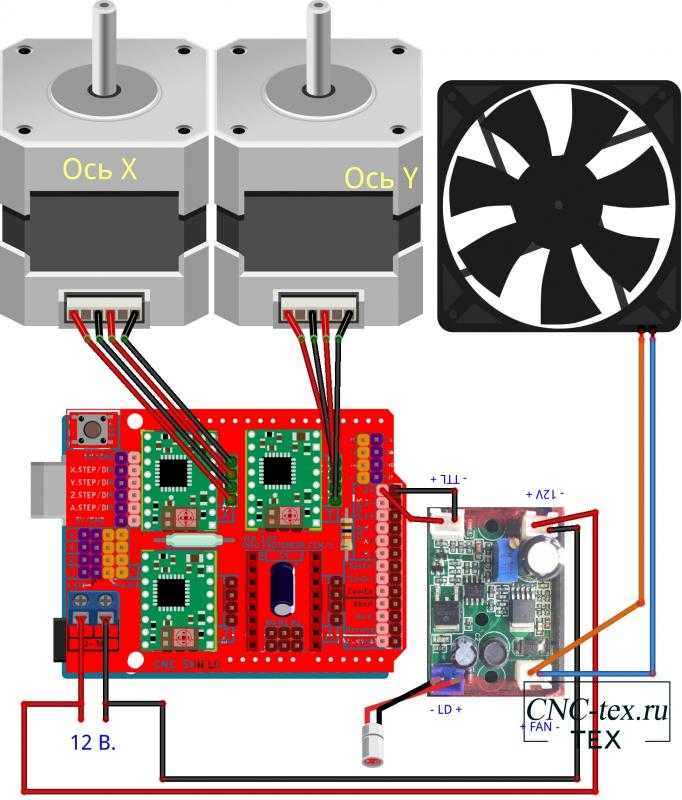
Подключаем все вот по такой схеме. Я постарался все разместить и подписать так, как у меня на TTL драйвере. У вас может быть другой порядок подключения, но значительных отличий быть не должно.
Несколько фото подключения ttl laser driver к CNC shield v3.

Вот так выглядит установленная электроника. Как станок работает, смотрите в предыдущей статье. А в следующей статье рассмотрим: как загрузить GRBL 1.1 в Arduino UNO, настроить GRBL и запустить гравировку первого изделия.
Понравился проект Самодельный Лазерный гравёр с ЧПУ, в домашних условиях? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Схема соединения
Для передачи данных от пульта к роботу я использую радио модули NRF24L01. Они передают каждый раз массив значений. Чем меньше вес этого массива, тем быстрее будет передан сигнал и тем меньшую скорость передачи данных мы можем задать модулю, что уменьшит его энергопотребление. Поэтому данные с джойстика управления будем записывать в 2 ячейки массива типа byte.
Теперь рассмотрим как считываются данные с джойстика на пульте. VCC модуля соединяем с 5V Ардуино, GND с GND, потенциометр горизонтальной оси с A0, вертикальной с A1, кнопку не подключаем, так как задействовать не будем. Схема приведена ниже. Вид модуля может отличаться, но пины будут такими же (кроме случаев с отдельным подводом VCC и GND к каждому потенциометру и кнопке).
Считав данные с джойстика функциями analogRead(A0) (можно заменить А0 на horizontalSticPin ) и analogRead(A1) (можно заменить А1 на verticalSticPin ) получим следующие диапазоны значений. Вперед на вертикальной оси, назад 1023 на вертикальной оси, резкий поворот вправо на горизонтальной оси, резкий разворот влево 1023 на горизонтальной оси. Значения между ними будут давать градации поворотов: положение 0,0 даст плавный правый поворот вперед, а значение 1023,1023 даст плавный левый поворот назад.
Скетч Arduino — использование библиотеки AccelStepper
Управление шаговым двигателем без библиотеки идеально подходит для простых приложений с одним двигателем. Но если вы хотите управлять несколькими шаговыми двигателями, то вам понадобится библиотека.
Итак, для нашего следующего эксперимента мы будем использовать расширенную библиотеку шаговых двигателей под названием AccelStepper library. Она поддерживает:
- Ускорение и замедление.
- Одновременное управление несколькими шаговыми двигателями с независимым шагом для каждого двигателя.
Эта библиотека не включена в IDE Arduino, поэтому вам необходимо сначала установить ее.
Установка библиотеки
Чтобы установить библиотеку, перейдите в Эскиз> Include Library> Manage Libraries… Подождите, пока диспетчер библиотек загрузит индекс библиотек и обновит список установленных библиотек.
Отфильтруйте результаты поиска, набрав «Accelstepper». Щелкните первую запись и выберите «Установить».
Скетч Arduino
Вот простой код, который ускоряет шаговый двигатель в одном направлении, а затем замедляется, чтобы остановиться. Как только двигатель совершает один оборот, он меняет направление вращения. И он повторяет это снова и снова.
// Подключаем библиотеку AccelStepper
#include <AccelStepper.h>
// Устанавливаем выводы
const int dirPin = 2;
const int stepPin = 3;
// Определение тип интерфейса двигателя
#define motorInterfaceType 1
// Создаем экземпляр
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
void setup() {
// Устанавливаем максимальную скорость, коэффициент ускорения,
// начальную скорость и целевую позицию
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(200);
}
void loop() {
// Изменение направления вращения, когда двигатель достигнет целевого положения
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
// Передвинуть на 1 шаг
myStepper.run();
}
Пояснение к скетчу:
Мы начинаем с подключения недавно установленной библиотеки AccelStepper.
#include <AccelStepper.h>
Определяем выводы Arduino, к которым подключаются выводы STEP и DIR A4988. Устанавливаем motorInterfaceType значение 1. (1 означает внешний шаговый драйвер с выводами Step и Direction).
const int dirPin = 2; const int stepPin = 3; #define motorInterfaceType 1
Затем мы создаем экземпляр библиотеки с именем myStepper.
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
В функции setup() мы сначала устанавливаем максимальную скорость двигателя 1000. Затем мы устанавливаем коэффициент ускорения для двигателя, чтобы добавить ускорение и замедление к движениям шагового двигателя.
Затем мы устанавливаем обычную скорость 200 и количество шагов, например, 200 (поскольку NEMA 17 совершает 200 шагов за оборот).
void setup() {
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(200);
}
В функции loop() мы используем оператор If, чтобы проверить, как далеко двигателю нужно проехать (путем чтения distanceToGo), пока он не достигнет целевой позиции (moveTo). Как только distanceToGo станет равен нулю мы переключаем двигатель в противоположное направление, изменив moveTo на противоположное значение относительно его текущего положения.
Теперь в конце цикла мы вызываем функцию run(). Это самая важная функция, поскольку шаговый двигатель не будет работать, пока эта функция не будет выполнена.
void loop() {
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
myStepper.run();
}
Описание библиотеки AccelStepper
Давайте мы перейдём к интересной части нашей статьи. Это описание двух библиотек для работы с двигателями myStepper
иAccelStepper
Больше буду обращать внимание на библиотекуAccelStepper, так как у нее больше функции, а именно:
- есть возможность управлять скоростью,
- поддержка различных шаговиков
- поддержка одновременно работающих двигателей
Определение конфигурации моторов
Для управления шаговым двигателем.
Биполярный ШД, управляемый Н-мостом.
Униполярный мотор, управляемый четырмя транзисторами.
Максимальная скорость двигателя. Скорость заведомо низкая. Сначала моторчик ускоряется до этой скорости, затем снижает её
Ускорение шаговика, в шагах в секунду.
Управление положением
Переместиться в абсолютно указанное положение. Само движение запускается функцией run ().
Переместиться в относительно указанное положение. Само движение запускается функцией run (). Значение distance может быть больше или меньше нуля.
Вернуть текущее абсолютное положение.
Вернуть расстояние до указанного положения. Может использоваться для проверки, достиг ли моторчик указанной конечной точки.
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Начать движение и подождать когда двигатель достигнет указанной точки. Функция не осуществляет возврата пока он не остановится.
Управление скоростью
Установить скорость в шагах за секунду. Сам процесс запускается функцией runSpeed ().
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Как видите функции управления в принципе не сложны, достаточно посидеть несколько вечеров.
About the driver
At the heart of the A4988 driver you will find a chip made by Allegro MicroSystems: the A4988 DMOS Microstepping Driver with Translator and Overcurrent Protection. This integrated motor driver makes interfacing with a microcontroller super easy as you only need two pins to control both the speed and the direction of the stepper motor.
The driver has a maximum output capacity of 35 V and ± 2 A which is great for driving small to medium-sized stepper motors like a NEMA 17 bipolar stepper motor.
If you need to control larger stepper motors like NEMA 23, take a look at the TB6600 stepper motor driver. This driver can be used with the same code as the A4988 and has a current rating of 3.5 A.
TB6600 Stepper Motor Driver with Arduino Tutorial
The A4988 driver chip has several safety functions built-in like overcurrent, short circuit, under-voltage lockout, and over-temperature protection. You can find more specifications in the table below.
A4988 Specifications
| Minimum operating voltage | 8 V |
| Maximum operating voltage | 35 V |
| Continuous current per phase | 1 A |
| Maximum current per phase | 2 A |
| Minimum logic voltage | 3 V |
| Maximum logic voltage | 5.5 V |
| Microstep resolution | full, 1/2, 1/4, 1/8 and 1/16 |
| Reverse voltage protection? | No |
| Dimensions | 15.5 × 20.5 mm (0.6″ × 0.8″) |
| Cost | Check price |
For more information you can check out the datasheet here.
A4988 Datasheet
Differences between the A4988 and DRV8825
The DRV8825 is quite similar to the A4988 but there are some key differences:
- The DRV8825 offers 1/32 microstepping, whereas the A4988 only goes down to 1/16-step. Higher microstepping results in smoother, quieter operation but is not always needed.
- The current limit potentiometer is at a different location
- The relation between the reference voltage and the current limit is different.
- The DRV8825 requires a minimum STEP pulse duration of 1.9µs; the A4988 requires 1µs minimum.
- The DRV8825 can be used with a higher voltage motor power supply (45 V vs 35 V). This means it is less susceptible to damage from LC voltage spikes.
- The DRV8825 can deliver slightly more current than the A4988 without any additional cooling.
Note that the pinout of the DRV8825 is exactly the same as for the A4988, so it can be used as a drop-in replacement!
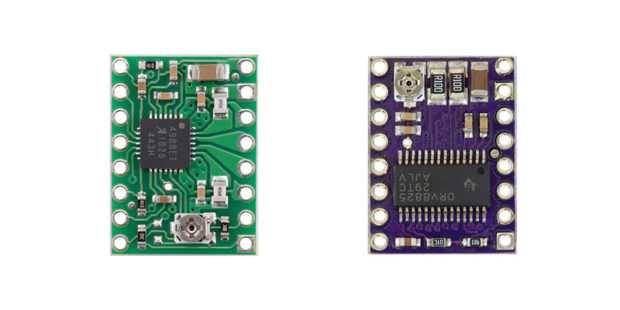
A4899 (left) vs DRV8825 (right)
Microstep settings
Stepper motors typically have a step size of 1.8° or 200 steps per revolution, this refers to full steps. A microstepping driver such as the A4988 allows higher resolutions by allowing intermediate step locations. This is achieved by energizing the coils with intermediate current levels.
For instance, driving a motor in quarter-step mode will give the 200-step-per-revolution motor 800 microsteps per revolution by using four different current levels.
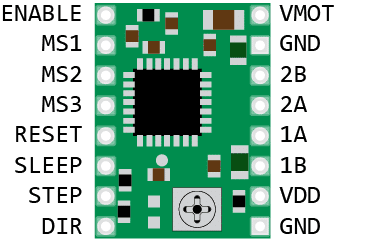
A4988 pinout
The resolution (step size) selector pins (MS1, MS2, and MS3) allow you to select one of the five step resolutions according to the table below.
| MS1 | MS2 | MS3 | Microstep resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | 1/2 step |
| Low | High | Low | 1/4 step |
| High | High | Low | 1/8 step |
| High | High | High | 1/16 step |
All three inputs have internal 100 kΩ pull-down resistors, so leaving the three microstep selection pins disconnected results in full-step mode.
I often use a CNC-shield or expansion board in combination with these drivers. The expansion board has 3 dip switches to set MS1 – MS3 high or low and on the CNC-shield you can install jumpers. If you are using the driver with a breadboard, you can just use jumper wires to connect the selector pins to 5 V (i.e. make them HIGH).
Распиновка драйвера A4988
Драйвер A4988 имеет всего 16 контактов, которые связывают его с внешним миром. Распиновка у A4988 следующая:
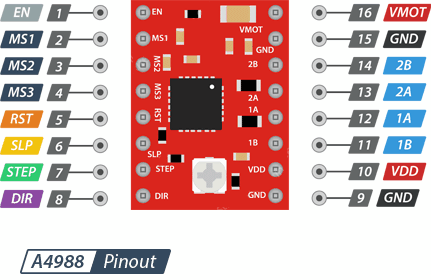
Давайте ознакомимся со всеми контактами по очереди.
Выводы питания
На самом деле A4988 требует подключения двух источников питания.
VDD и GND используется для управления внутренней логической схемой. Напряжение питания должно находиться в пределах от 3 до 5,5 В.
Vmot и GND для обеспечения питания шагового двигателя. Тут напряжение в пределах от 8 до 35 В.
Согласно datasheet, для питания двигателя требуется соответствующий разделительный конденсатор рядом с платой, способный выдерживать ток 4 А.
Выводы выбора микрошага
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пяти ступенчатых разрешений.
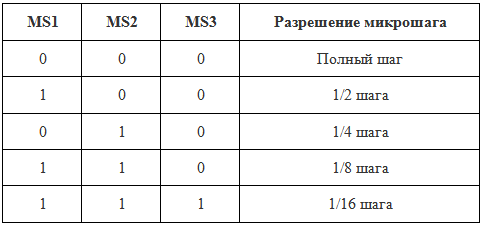
По умолчанию эти три контакта подтянуты к земле внутренним резисторам. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
Выводы управления
Драйвер A4988 имеет два управляющих входа, а именно: STEP и DIR.
STEP — управляет микрошагом мотора. Каждый высокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращается по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы управления питанием A4988
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать это для экономии энергии.
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Выводы для подключения шагового двигателя
Выходные контакты: 1B, 1A, 2A и 2B.
К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
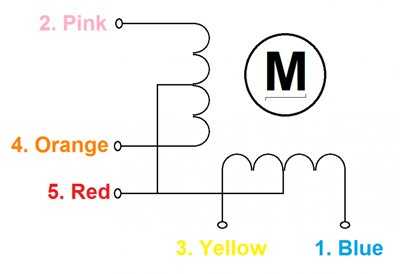
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
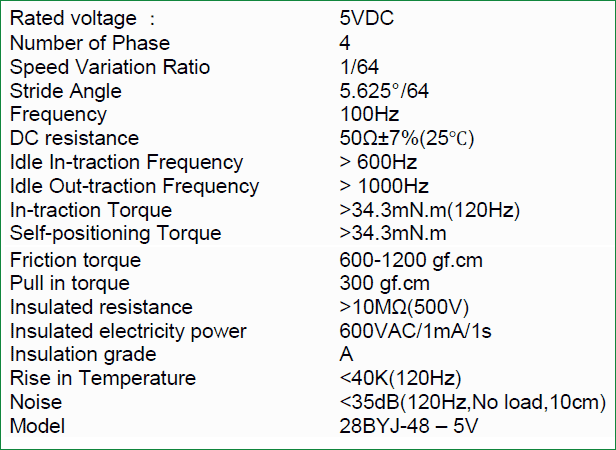
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.



