Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током.
Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи.
Они позволяют из постоянного напряжения сделать трехфазные импульсы.
Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате
А лучше превышать для безопасной работы системы.
Напряжение должно быть в допустимых широких диапазонах.
Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
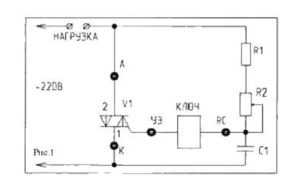 Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
https://youtube.com/watch?v=Fl9Y0TysWps
Работа электродвигателя постоянного тока
Под токосъемником простейшего двигателя две секции. Выродился барабан коллектора. Каждая контактная ламель (пластинка на валу) занимает половину оборота. Одна щетка снабжается положительным потенциалом, вторая – отрицательным, сообразно меняется направление магнитного поля полюсов. Активными в каждый момент времени являются два (в описанной выше конструкции). Статора может формироваться постоянным электрическим полем, либо металлическим магнитом. Последнее применяется детскими машинками.
Как работает электродвигатель постоянного тока. Допустим, в начальный момент времени обмотки расположены так, как показано на рисунке. В нашем примере полюсов уже не два, как обсуждали выше, – три. Минимальное число для стабильного запуска электрического двигателя постоянного тока в нужном направлении. Обмотки соединены схемой звезды, у каждой пары одна общая точка. Напряженность поля формирует два полюса отрицательных, один положительный. Постоянный магнит стоит, как показано рисунком.
Упрощенный рисунок случая постоянного тока
Каждую треть оборота происходит перераспределение поля так, что полюса сдвигаются согласно изменению напряжения питания на ламелях. На второй эпюре видим: номера обмоток сдвинулись, картина в пространстве осталась. Залог стабильности: один полюс притягивается к постоянному магниту, второй отталкивается. Если нужно получить реверс, меняется полярность подключения батарейки (аккумулятора). В результате получается два положительных полюса, один отрицательный. Вал станет двигаться против часовой стрелки.
Полагаем, принцип действия электродвигателя постоянного тока теперь понятен. Добавим, сегодня распространены двигатели вентильного типа. Многие задумались заставить поля чередоваться на статоре, ротор представлял бы постоянный магнит. В первом приближении двигатель вентильного типа. Постоянный ток подается на нужные обмотки статора через коммутируемые ключи-тиристоры. В результате создается нужное распределение поля.
Преимущества схемы в снижении количества трущихся частей, являющихся причиной необходимости обслуживания, ремонта. Тиристорный блок управления достаточно сложный. Допускается организовать коммутацию при помощи ламелей. Одновременно конструкция послужит грубым датчиком положения вала (плюс минус расстояние между контактными площадками оси вала). Вентильные двигатели не новы. Широко применяются специфическими отраслями. Помогают точно выдержать частоту вращения. В быту вентильные двигатели найти сложно. Некое подобие можно лицезреть в стиральной машине. Речь о помпе слива воды (ротор магнитный, только ток переменный).
https://youtube.com/watch?v=bLpn8IersUA
https://youtube.com/watch?v=5INm28VhX5Y
Технические характеристики электродвигателей постоянного тока лучше, нежели при питании переменным током. Класс устройств широко применяется. Чаще электродвигатели постоянного тока используются при питании батареями различного рода. Когда нет выбора. Преимущества схемы питания позволят аккумуляторам дольше продержаться.
Обмотки статора, ротора включают последовательно, параллельно. Последнее применяется при нагруженном в исходном состоянии валу. Наблюдается резкое повышение оборотов, может привести к негативным последствиям, если ротор слишком легко идет. Упоминали о подобных тонкостях в теме конструирования двигателей своими руками.
С двумя кнопками
Этой схемой Интернет буквально завален. Ведь она позволяет запускать двигатель и управлять направлением его вращения всего двумя обычными кнопками! Нажал на одну – мотор крутится влево. Нажал на другую – вправо. Не нажал – все отключено.
Теоретически все верно. Для питания электродвигателя М1 используется переменный ток. Пока ни одна из кнопок не нажата, двигатель не вращается, поскольку он подключен к питанию через диоды D1, D2, соединенные встречно-последовательно.
Как только мы нажмем на одну из кнопок, один из диодов окажется закорочен, а второй начнет работать как однополупериодный выпрямитель, подавая на мотор выпрямленное напряжение. Полярность этого напряжения, а значит, и направление вращения двигателя, будут зависеть от того, какая из кнопок нажата.
На практике же такая конструкция имеет огромный недостаток. Мощность электромотора, питаемого таким «криво» выпрямленным напряжением, составит не более 40 % от его номинала. Если учесть то, что КПД самого мотора обычно составляет порядка 50%, то нам останется только погрустить.
https://youtube.com/watch?v=YP8NbdRv03g
Способы электрического торможения электроприводов
Для того чтобы быстро остановить устройство или обеспечить постоянную скорость вращения используют электрические способы остановки. В зависимости от схемы включения тормозные режимы подразделяют на:
- противовключения;
- динамический;
- рекуперативный.
Противовключения
Режим противовключения применяется при необходимости быстрой остановки механизма. Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
В этом случае ротор вращается в противоположном направлении магнитного поля статора. Вращение ротора замедляется. При скорости вращения близкой к нулю с реле контроля скорости поступает сигнал, отключая механизм от сети.
На нижеприведенном рисунке представлена схема противовключения асинхронного электромотора.
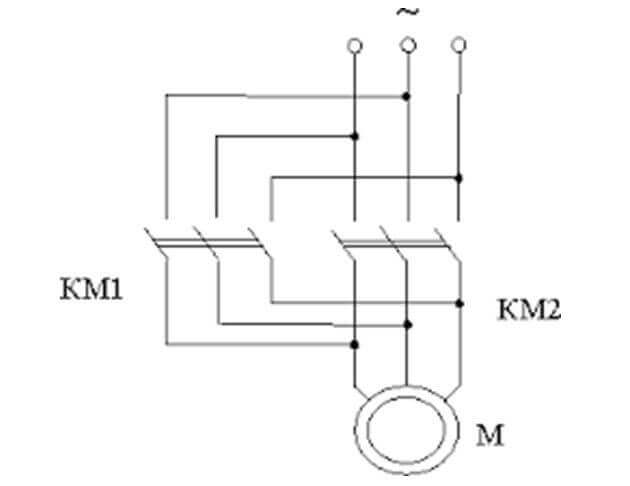
После переключения обмоток возникает повышенное действующее напряжение и увеличение тока. Для его ограничения, в обмотки ротора или статора устанавливают дополнительные резисторы. Они ограничивают токи в обмотках в режиме торможения.
Динамическая остановка электропривода
Этот способ применяют на асинхронных машинах, подключенных к сети переменного тока. Он заключается в отключении обмоток от сети переменного напряжения и подачи постоянного тока на обмотку статора.

На вышеприведенном рисунке представлена схема торможения трехфазного двигателя постоянным током.
Подача постоянного напряжения осуществляется с помощью понижающего трансформатора для динамического торможения. Пониженное переменное напряжение преобразуется в постоянное диодным мостом и подается на статорную обмотку. Для торможения электромотора может применяться дополнительный источник постоянного тока.
При этом ротор может быть выполнен в виде «беличьей клетки» или ее обмотку подключают к добавочным резисторам.
Постоянное напряжение создает неподвижный магнитный поток. При вращении ротора в нем наводится ЭДС, т.е. электромотор переходит в режим генератора. Возникающая электродвижущая сила рассевается на обмотке ротора и добавочных резисторах. Создается тормозной момент. В момент остановки механизма постоянное напряжение отключается по сигналу реле скорости.
Механизмы, где применяется электродвигатель с самовозбуждением, динамическую остановку выполняют с помощью подключения конденсаторов. Они соединяются треугольником или звездой.
Схема приведена на нижеприведенном рисунке.
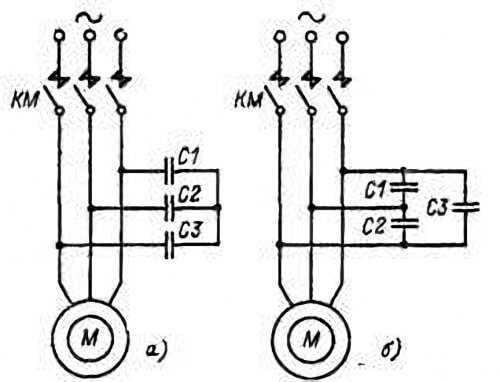
На выбеге остаточная энергия магнитного поля переходит в заряд конденсаторов, а затем она питает обмотку статора. Возникающий тормозной эффект останавливает механизм. Конденсаторная батарея может быть подключена постоянно или подсоединяться в момент отключения от сети. Такая схема получила название “конденсаторное торможение асинхронного двигателя”.
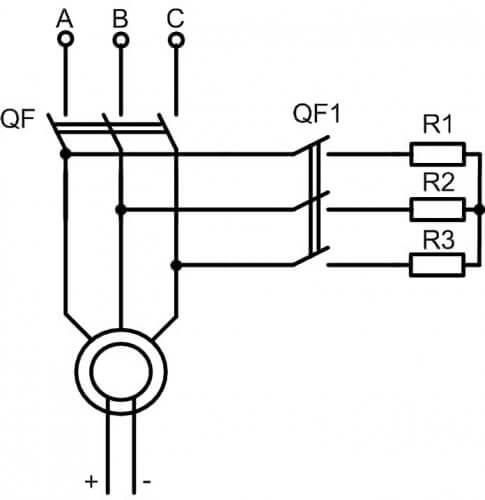
Если необходимо быстро остановить двигатель, то после отключения от сети, замыкают контакты накоротко без гасящих резисторов. При соединении обмоток закорачиванием в них возникают большие токи. Для уменьшения токов к обмоткам подключают токоограничивающие резисторы.
На нижеприведенном рисунке представлена схема с токоограничивающими резисторами.
Принцип управления двигателем при помощи Arduino и драйвера L298N
Благодаря наличию в драйвере L298N встроенного моста данная плата позволяет осуществлять одновременное управление сразу двумя электрическими машинами от двух пар выводов. Логическая схема в данном устройстве работает от напряжения в 5В, а питание самих электрических машин можно осуществлять до 45В включительно. Максимально допустимый ток для одного канала платы составляет 2А.
Как правило, этот драйвер имеет модульное исполнение, за счет чего в комплект модуля уже включены рабочие элементы, выводы и разъемы, необходимые для передачи управляющих сигналов. Пример такого драйвера показан на рисунке ниже:
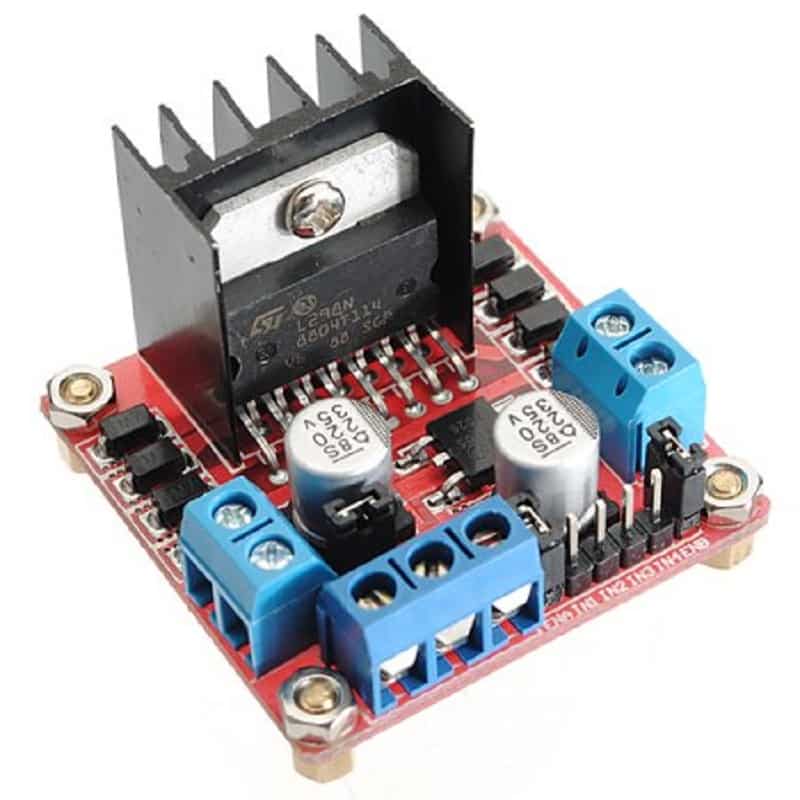
Пример драйвера L298N
Теперь разберем, как осуществляется управление двигателем с помощью драйвера L298N. Подключение двигателя производится к винтовым клеммным зажимам – по паре для питания каждого моторчика. Остальные клеммные зажимы предназначены для подачи питания плюс и минус, а также получения пониженного напряжения (на них подается определенный уровень питающего напряжения, от которого работают двигатели, а внутренний преобразователь понижает его до 5В для собственных логических цепей). Штекерные выводы платы осуществляют широтно-импульсную модуляцию при формировании рабочих сигналов.
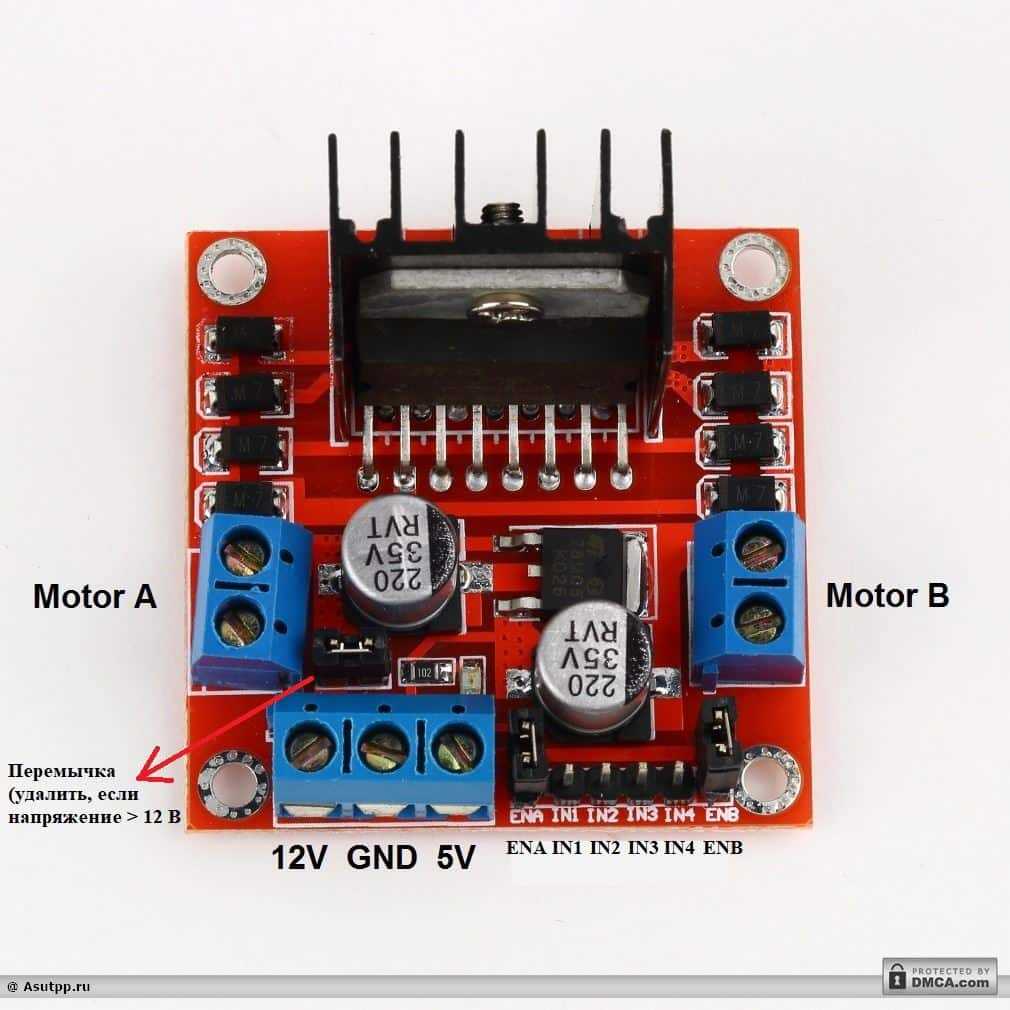
Зажимы, куда подключать моторы
Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше. Этот выход можно использовать для запитки того же Ардуино или для любых других устройств, которые питаются от 5В.
Немаловажным моментом для получения 5В от этого клеммного вывода является установка черной перемычки, которая отвечает за преобразование отличного от 5 В уровня напряжения, при условии, что его уровень ниже 12В. Если уровень питающего напряжения выше 12В, перемычку необходимо снять, так как внутренний преобразователь на него не рассчитан, а сама плата должна запитываться от 5В через третий вывод этого же клеммника.
Асинхронный или коллекторный: как отличить
Вообще, отличить тип двигателя можно по табличке — шильдику — на которой написаны его данные и тип. Но это только в том случае, если его не ремонтировали. Ведь под кожухом может быть что угодно. Так что если вы не уверены, лучше определить тип самостоятельно.
Так выглядит новый однофазный конденсаторный двигатель
Как устроены коллекторные движки
Отличить асинхронный и коллекторный двигатели можно по строению. У коллекторных обязательно есть щетки. Они расположены возле коллектора. Еще обязательный атрибут движка этого типа — наличие медного барабана, разделенного на секции.
Такие двигатели выпускаются только однофазные, они часто устанавливаются в бытовой технике, так как позволяют получить большое число оборотов на старте и после разгона. Также они удобны тем, что легко позволяют менять направление вращения — необходимо только поменять полярность. Несложно также организовать изменение скорости вращения — изменением амплитуды питающего напряжения или угла его отсечки. Потому и используются подобные двигатели в большей части бытовой и строительной техники.
Строение коллекторного двигателя
Недостатки коллекторных двигателей — высокая шумность работы на больших оборотах. Вспомните дрель, болгарку, пылесос, стиральную машину и т.д.. Шум при их работе стоит приличный. На малых оборотах коллекторные двигатели не так шумят (стиральная машина), но не все инструменты работают в таком режиме.
Второй неприятный момент — наличие щеток и постоянного трения приводит к необходимости регулярного технического обслуживания. Если токосъемник не чистить, загрязнение графитом (от стирающихся щеток) может привести к тому, что соседние секции в барабане соединятся, мотор попросту перестанет работать.
Асинхронные
Асинхронный двигатель имеет статор и ротор, может быть одно и трёхфазным. В данной статье рассматриваем подключение однофазных двигателей, потому речь пойдет только о них.
Асинхронные двигатели отличаются невысоким уровнем шумов при работе, потому устанавливаются в технике, шум работы которой критичен. Это кондиционеры, сплит-системы, холодильники.
Строение асинхронного двигателя
Есть два типа однофазных асинхронных двигателей — бифилярные (с пусковой обмоткой) и конденсаторные. Вся разница состоит в том, что в бифилярных однофазных двигателях пусковая обмотка работает только до разгона мотора. После она выключается специальным устройством — центробежным выключателем или пускозащитным реле (в холодильниках). Это необходимо, так как после разгона она только снижает КПД.
В конденсаторных однофазных двигателях конденсаторная обмотка работает все время. Две обмотки — основная и вспомогательная — смещены относительно друг друга на 90°. Благодаря этому можно менять направление вращения. Конденсатор на таких двигателях обычно крепится к корпусу и по этому признаку его несложно опознать.
Более точно определить бифилярный или конденсаторный двигатель перед вами, можно при помощи измерений сопротивления обмоток. Если сопротивление вспомогательной обмотки больше в два раза (разница может быть еще более значительная), скорее всего, это бифилярный двигатель и эта вспомогательная обмотка пусковая, а значит, в схеме должен присутствовать выключатель или пусковое реле. В конденсаторных двигателях обе обмотки постоянно находятся в работе и подключение однофазного двигателя возможно через обычную кнопку, тумблер, автомат.
Вращающий момент электродвигателя
В двигателях постоянного тока вращающий момент определяется выражением М ≡ ФIя, т.е. он пропорционален потоку и току якоря. В асинхронном двигателе момент создается вращающимся потоком Ф и током ротора I2. Он может быть выражен
Следовательно, момент пропорционален потоку и активной слагающей тока ротора I2 cos Ψ2, так как только активная слагающая тока определяет мощность, а значит и момент.
На рис. 10-20 представлена схема включения короткозамкнутого двигателя. Если пустить двигатель, включив рубильник 1, то в первый момент пуска, когда п2= 0, a s = 1, наведенная в роторе 2 э. д. с. Е2 и пусковой ток I2п максимальны. Однако, пусковой момент Мп не будет максимальным, а в 2—2,5 раза меньше максимального. Векторная диаграмма для цепи ротора (рис. 10-21), построенная подобно изображенной на рис. 9-9, показывает причину этого.
Рис 10-20. Схема включения короткозамкнутого асинхронного двигателя.
Обычно в роторе х2во много раз больше r2 и угол Ψ2, на который ток I2п отстает от э. д. с. Е2 велик. Поэтому активная слагающая тока I2п cos Ψ2, а значит и пусковой момент Мп малы. В современных асинхронных двигателях Мп/Мп = 1 — 1,5, хотя I2п/ Iн≈ 4,5—6,5.
Это же явление по другому объясняется на рис. 10-19 и 10-22.
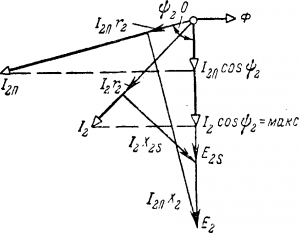
Рис. 10-21. Векторная диаграмма в цепи ротора.
При описании принципа работы двигателя (рис. 10-19) было предположено, что ток I2 совпадает по фазе с э. д. с. Е2, т. е. что он активный ( Ψ2 = 0). На рис. 10-22 представлен момент пуска, когда направление э. д. с. в проводах ротора соответствует обозначенному на рис. 10-19, а ток показан отстающим от э. д. с. на угол Ψ2. Тогда шесть проводов ротора (три под полюсом N и три под полюсом S) создают усилия, действующие в направлении вращения потока, а два провода вызывают противодействующие усилия. В результате этого вращающий момент будет тем меньше, чем больше сдвиг фаз между током I2 и э. д. с. E2.
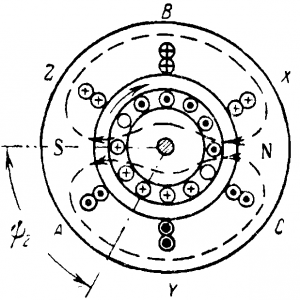
Рис. 10-22. Ток в роторе двигателя в момент пуска.
По мере увеличения скорости вращения ротора реактивное сопротивление обмотки ротора x2s = x2s уменьшается, а вместе с этим уменьшается угол Ψ2, так как сопротивление r2≈ const. Наступает такое положение (рис 10-21), когда при некотором скольжении sм ≈ 0,1—0,15 реактивное сопротивление x2s становится равным активному r2, угол Ψ — 45° и э. д. с. E2s уравновешивает два равных падения напряжения I 2r2 и I2x2s.В это время активная слагающая тока I2 cos Ψ2 и вращающий момент М м становятся максимальными, несмотря на некоторое уменьшение тока I2.
Обычно Мм/Мм = 1,8—2,5 и называется способностью к перегрузкe.
При дальнейшем разгоне ротора x2s становится значительно меньшим, чем r2, им можно пренебречь и считать ток ротора активным (I2 ≈ I2 cos Ψ 2). Так как E2s= E2s тоже продолжает уменьшаться, то вместе с током I2 уменьшается и вращающий момент.
Максимальная скоростьn вращения будет при холостом ходе двигателя и тогда n 2 ≈ n 1 , a s ≈ 0. Зависимость вращающего момента от скольжения М = f (s) представлена на рис. 10-23.
Рис. 10-23. Зависимость вращающего момента двигателя от скольжения.
Нормальная работа двигателя возможна только на участке кривой при скольжениях s от нуля до sм, так как в этом случае при увеличении тормозного момента и значит s вращающий момент возрастает. На участке от s = sм до s = 1 работа двигателя неустойчива. Номинальный момент Мн соответствует обычно номинальному скольжению sн = 1—6%.
Поток Ф пропорционален напряжению U1, подводимому к трансформатору. Сказанное остается в силе и для асинхронного двигателя. Так как М ≡ ФI2 cos Ψ 2, то можно написать, что
Отсюда можно сделать очень важный для асинхронных двигателей вывод
т. е. вращающий момент пропорционален квадрату подведенного к статору напряжения. Таким образом, падение напряжения в сети, например до 0,9 U1н, вызовет уменьшение момента до 0,9 • 0,9 Мн= 0,81 Мн и нагруженный двига тель может остановиться. Указанным обстоятельством и объясняется, частично, нормирование падения напряжения в распределительных сетях, питающих асинхронные двигатели.
В практике потребителя часто интересует механическая характеристика двигателя
п2= f (М) при U1= const и f1 = const. Для удобства пользования по осям откладывают (n2/n1)100% и (М/Мн)100%.
Рис. 10-24. Механическая характеристика двигателя.
Эта характеристика получается простым перестроением рис, 10-23 и показана на рис. 10-24, где рабочая часть обозначена сплошной линией. Кривая 1 для двига телей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости, подобно двигателю постоянного тока параллельного возбуждения. Асинхронный двигатель с фазным ротором для регулирования скорости вращения, например для крановых и подъемных устройств, имеет более мягкую характеристику (кривая 2).
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
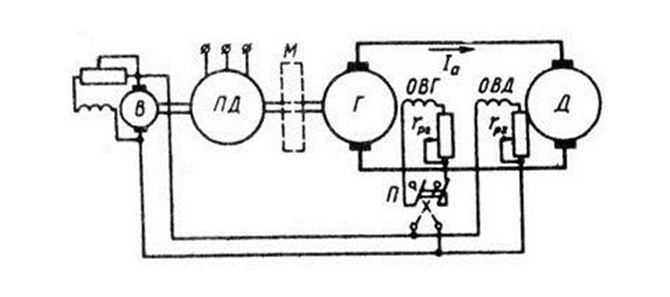
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей
Вариантов подобных схем множество, поэтому важно понять сам принцип
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
https://youtube.com/watch?v=0T7wvGysZBk
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
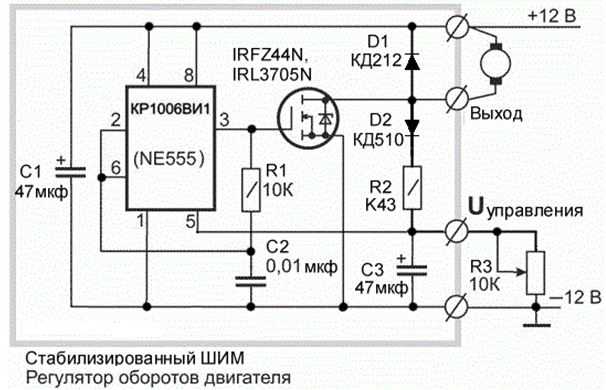
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
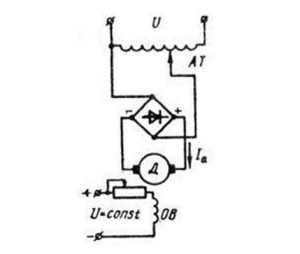
Есть еще один вариант, только это уже не для 12, а для 24в питания.
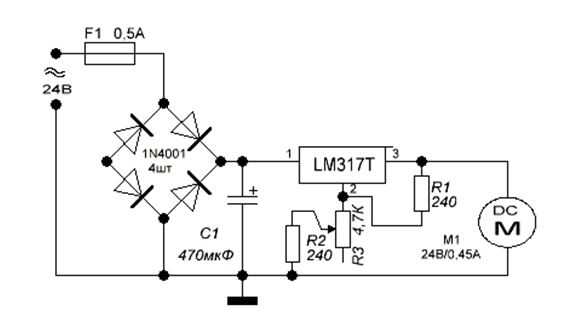
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
Виды двигателей и принцип работы
Двигатели делятся на три типа: коллекторный, асинхронный и бесколлекторный. В большинстве электроинструментов стоит первый тип. Этот электродвигатель имеет довольно компактный размер. Его мощность значительно выше, чем у асинхронного, а цена довольно низкая. Что касается асинхронных, то этот тип в основном используется в металлообрабатывающей отрасли, а также широкое распространение они получили в угледобывающих шахтах. Довольно редко их можно встретить в быту.
Бесколлекторный электродвигатель используется там, где нужны большие обороты, точное позиционирование и малые размеры. Например, в различной медицинской технике, авиамоделировании. Принцип работы довольно прост. Если рамку прямоугольной формы, которая имеет ось вращения, поместить между плюсами постоянного магнита, то она начнет вращаться. Направление зависит от направления тока в рамке. В составе этого типа присутствуют якорь и статор. Якорь вращается, а статор стоит неподвижно. Как правило, на якоре стоит не одна рамка, а 4,5 или более.
Асинхронный двигатель работает по другому принципу. Благодаря эффекту переменного магнитного поля в статорных катушках он приводится во вращение. Если углубиться в курс физики, то можно вспомнить, что вокруг проводника, через который проходит ток, создается своеобразное магнитное поле, заставляющее вращаться ротор.
На рисунке отчетливо видно, что для перемещения ротора нужно выполнить необходимую коммутацию, но и регулировать обороты не представляется возможным. Тем не менее бесколлекторный двигатель может очень быстро набирать обороты.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
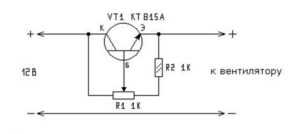
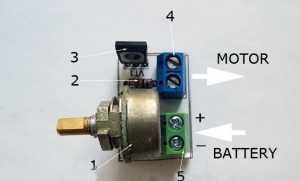
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
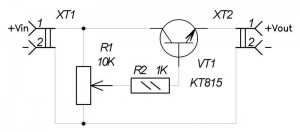
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
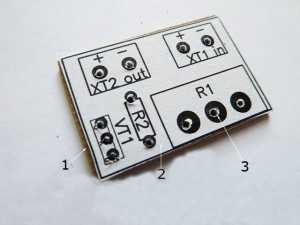
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.


Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Момент двигателя постоянного тока
Если обмотку возбуждения и якорь двигателя подключить к сети постоянного тока напряжением U то, возникает электромагнитный вращающий момент Мэм. Полезный вращающий момент М на валу двигателя меньше электромагнитного на значение противодействующего момента, создаваемого в машине силами трения и равного моменту Мх в режиме х.х., т. е. М = Мэм—Мх.
Пусковой момент двигателя должен быть больше статического тормозного Мт в состоянии покоя ротора, иначе якорь двигателя не начнет вращаться. В установившемся режиме (при n = соnst) имеет место равновесие вращающего М и тормозного Мт моментов:
Из механики известно, что механическая мощность двигателя может быть выражена через вращающий момент и угловую скорость
Следовательно, полезный вращающий момент двигателя М (Н • м), выраженный через полезную мощность Р (кВт) и частоту вращения n (об/мин),
Обсудим некоторые важные вопросы пуска и работы двигателей постоянного тока. Из уравнения электрического состояния двигателя следует, что
В рабочем режиме ток якоря Iя ограничивается э. д. с. E, если n приблезительно равно nном. В момент пуска п = 0, э. д. с. Е = 0 и пусковой ток Iп = U/Rяв 10—30 раз больше номинального. Поэтому прямой пуск двигателя, т. е. непосредственное включение якоря на напряжение сети, недопустимо. Чтобы ограничить большой пусковой ток якоря, перед пуском последовательно с якорем включается пусковой реостат Rп с небольшим сопротивлением. В этом случае при Е = О
После пуска и разгона наступает установившийся режим работы двигателя, при котором тормозной момент на валу Мт будет уравновешиваться моментом, развиваемым двигателем Мэм, т. е. Мэм == Мт(при n = соnst.)
Электродвигатели постоянного тока могут восстанавливать нарушенный изменением тормозного момента установившийся режим работы, т. е. могут развивать вращающий момент М, равный новому значению тормозного момента Мт при соответственно новой частоте вращения n’.
Действительно, если тормозной момент нагрузки Мт окажется больше вращающего момента двигателя Мэм, то частота вращения якоря уменьшится. При постоянных напряжении U и потоке Ф это вызовет уменьшение э. д. с. Е якоря, увеличение тока якоря и вращающего момента до наступления равновесия, при котором Мэм = Мт и n’ n’. Таким образом, двигатели постоянного тока обладают свойством саморегулирования — могут развивать вращающий момент, равный тормозному.
Регулирование частоты
Частота вращения якоря двигателя постоянного тока определяется на основании уравнения электрического состояния U = Е + RяIяпосле подстановки в него э. д. с. Е = сФn:
Падение напряжения в якоре RяIя небольшое: при номинальной нагрузке оно не превышает 0,03 — 0,07 Uном.
Таким образом, частота вращения двигателя постоянного тока прямо пропорциональна приложенному напряжению сети и обратно пропорциональна магнитному потоку статора. Из уравнения (13) следует, что регулировать частоту вращения двигателя можно двумя способами: изменяя поток статора Ф или напряжение U подводимое к двигателю. Регулирование частоты вращения изменением магнитного поля машины осуществляется с помощью регулировочного реостата в цепи возбуждения двигателя. Изменение подводимого к двигателю напряжения производится регулированием напряжения источника.
Можно ввести дополнительный реостат в цепь якоря. В этом случае пусковой реостат заменяется пускорегулирующимRпр Такой реостат выполняет функции как пускового реостата, так и регулировочного. Уравнение (13) при этом имеет вид
Отсюда следует, что регулирование частоты вращения двигателя можно осуществить, изменяя напряжение сети, сопротивление пускорегулирующего реостата или поток статора.
Реверсирование двигателей. Из уравнения вращающего момента двигателя Мэм = kФIя вытекает, что реверсирование, т. е. изменение направления вращения якоря, может быть осуществлено изменением направления тока в обмотке возбуждения (потока Ф) или тока якоря.
Для реверсирования двигателя «на ходу» изменяют направление тока якоря (переключением якорных выводов), а обмотку возбуждения не переключают, так как она обладает большой индуктивностью и разрыв ее цепи с током недопустим. Реверсирование отключенного двигателя осуществляется и изменением направления тока в обмотке возбуждения (переключением ее выводов).
Источник



