Скетч Arduino «Knob» (управление сервой с помошью потенциометра)
Программа, в которой положение выходного вала сервы контролируется углом поворота ручки потенциометра даже проще, чем рассмотренный ранее автоматический поворот и возврат в исходное положение.
#include <Servo.h>
int servoPin = 9;
servo.attach(servoPin);
int reading = analogRead(potPin); // от 0 до 1023
int angle = reading / 6; // от 0 до 180
servo.write(angle);
В скетче добавлена переменная с именем «potPin».
Для того, чтобы вывести вал сервы в положение, мы считываем значение с контакта Arduino A0. Значение с этого контакта будет находится в диапазоне между 0 и 1023. Так как серва может поворачиваться только на 180 градусов, нам надо масштабировать полученные значения. Разделив значения с контакта A0 на 6 мы получаем угол в диапазоне от 0 до 170, что нас вполне устраивает.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный — к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам — принцип управления серво мы уже описывали ранее.
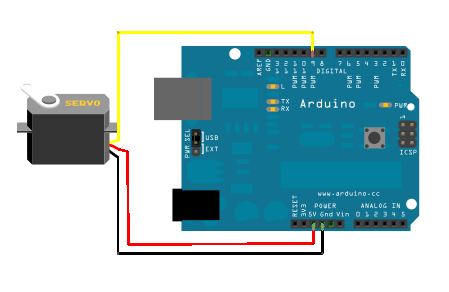
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью — повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в «дергании» серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
- красный — питание; подключается к контакту или напрямую к источнику питания
- коричневый или чёрный — земля
- жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека .
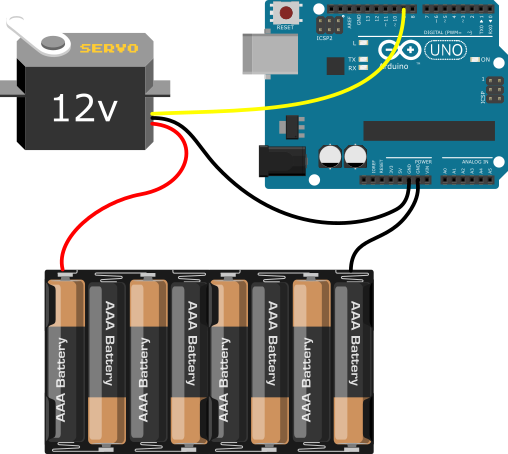
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать на 11 и 12 контактах.
Пример использования библиотеки Servo
- servo_example.ino
-
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
-
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500); }
Пример использования библиотеки Servo
- servo2_example.ino
-
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.h> // создаём объект для управления сервоприводом Servo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые — контроллеры.

Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.

Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Переделка сервопривода в серво непрерывного вращения
Как описывалось выше, сервопривод управляется импульсами переменной ширины, которые задают угол поворота. Текущее положение считывается с потенциометра. Если рассоединить вал и потенциометр, серводвигатель будет принимать положение движка потенциометра как в средней точке. Все эти действия приведут к тому, что будет убрана обратная связь. Это позволяет управлять скоростью и направлением вращения по сигнальному проводу, и создать серво непрерывного вращения
При этом важно отметить, что серво постоянного вращения не может поворачиваться на определенный угол и делать строго заданное количество оборотов
Чтобы произвести вышеописанные действия, придется разобрать устройство и внести изменения в конструкцию.
В Ардуино IDE нужно создать небольшой скетч, который поставит качалку в среднее положение.
#include <Servo.h>
Servo myservo;
void setup(){
myservo.attach(9);
myservo.write(90);
}
void loop(){
}
После этого устройство нужно подключить к Ардуино. При подключении серво начнет вращаться. Нужно добиться ее полной остановки путем регулирования резистора. После того, как вращение прекратится, нужно найти вал, вытащить из него гибкий элемент и установить обратно.
Этот метод имеет несколько недостатков – настройка резистора до полной остановки неустойчива, при малейшем ударе/нагреве/охлаждении настроенная нулевая точка может сбиться. Поэтому лучше использовать способ замены потенциометра подстроечником. Для этого нужно вытащить потенциометр и заменить его на подстроечный резистор с таким же сопротивлением. Нулевую точку нужно настроить калибровочным скетчем.
Любой из методов переделки сервопривода в серво непрерывного вращения имеет свои недостатки. Во-первых, сложно настроить нулевую точку, любое движение может ее сбить. Во-вторых, диапазон регулирования мал – при небольшом изменении ширины импульса скорость может значительно измениться. Расширить диапазон можно программно в Ардуино.
Скетч для управления сервоприводом в Arduino
Для управления углом поворота сервопривода, в программном коде можно либо вбивать ширину имлульсов вручную и подбирать точный угол, либо задавать угол в виде градусов при помощи команды библиотеки.
ЧИТАТЬ ДАЛЕЕ: Промежуточное реле назначение принцип действия
• Вариант 1
В данном скетче зададим 3 угла поворота выходного вала сервопривода используя управление изменением непосредственно значения ширины импульса. Данный метод самый точный, однако для каждого угла ширину импульсов придется подбирать индивидуально.
//Тестировалось на Arduino IDE 1.0.1// добавляем библиотеку для работы с сервоприводами #include {amp}lt;Servo.h{amp}gt; // для дальнейшей работы назовем 9 пин как servoPin #define servoPin 9 // 544 это эталонная длина импульса при котором сервопривод должен принять положение 0° #define servoMinImp 544 // 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180° #define servoMaxImp 2400 Servo myServo; voidsetup() { myServo.attach(servoPin, servoMinImp, servoMaxImp); // устанавливаем пин как вывод управления сервоприводом,// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.// импульсы с большей или меньшей длиной восприниматься не будут.// для сервоприводов даже одной партии значения длин импульсов могут отличаться, может быть даже и 584-2440.// поэкспериментируйте и найдите идеальные длины импульсов конкретно для вашего сервопривода. } voidloop() { // устанавливаем качалку сервопривода в положение 0°(т.к.импульс равен 544мкс) myServo.writeMicroseconds(servoMinImp); delay(2000); // в данной функции можно задавать длины импульсов непосредственно числами. // 90°(т.к.vимпульс равен 1520мкс) myServo.writeMicroseconds(1520); delay(2000); // 180°(т.к. импульс равен 2400мкс) myServo.writeMicroseconds(servoMaxImp); delay(2000); }
• Вариант 2
//Тестировалось на Arduino IDE 1.0.1 #include {amp}lt;Servo.h{amp}gt; Servo myservo; voidsetup() { // устанавливаем пин как вывод управления сервой myservo.attach(9); } voidloop() { // устанавливаем угол 0° myservo.write(0); delay(2000); // устанавливаем угол 90° myservo.write(90); delay(2000); // устанавливаем угол 180° myservo.write(180); delay(2000); } myservo.read();Считывает текущий угол поворота сервопривода, возвращает значение типа int — угол от 0 до 180 градусов.
myservo.attached();Проверяем, привязан ли сервопривод. Возвращает логическое значение bool.
myservo.detach();Отключает сервопривод от пина.
• Что такое сервопривод?
• Отличие цифрового сервопривода от аналогового
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки.
Сервопривод и его разновидности
Как говорилось выше, сервопривод – это дополнительное оборудование, которое устанавливается на распределительный коллектор для теплого водяного пола.
Устройство применяется для регулирования потока воды, поступающего в нагревательные элементы. Это процесс осуществляется при помощи открытия и закрытия регулирующих вентилей, которые располагаются на обратной гребенке коллектора.
Механический сервопривод
Сервопривод механического типа является наиболее простым вариантом данного устройства.
Он имеет не сложную конструкцию и приемлемую стоимость.
Регулировка температуры производится непосредственно на самом устройстве вращением специального колесика, уменьшающего или увеличивающего показатели температуры.
Такое приспособление не согласовывается с термодатчиком и не может автоматически срабатывать (включаться и выключаться) при повышении и понижении температуры теплого пола от заданной установки.
Устройство требует постоянного контроля значения температуры при уходе из дома и даже перед сном, но срок его эксплуатации очень долгий и прибор не требует профилактических настроек и дополнительного обслуживания.
Электронный сервопривод для коллектора
Электронный вариант сервопривода теплого водяного пола представляет собой также достаточно простое устройство, которое способно автоматически осуществлять регулировку подачи теплоносителя в отопительный контур системы.
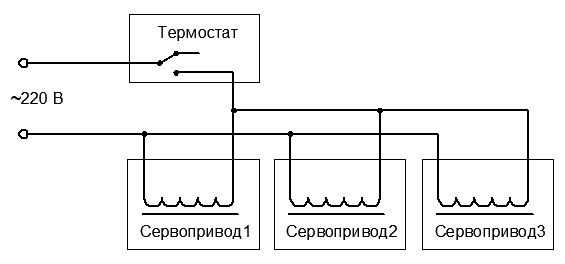
Схема коллектора с сервоприводом
Прибор имеет постоянное электронное согласование с терморегулятором, который является мозговым центром. Терморегулятор или термостат согласован с температурным датчиком, который устанавливается возле нагревательных элементов в стяжке теплого пола.
Соответственно на термостате выставляются граничные значения температуры, при которых сервопривод будет открывать и закрывать регулируемый вентиль для подачи горячей воды в контуры отопления. Один из вариантов подключения термостата к сервоприводам можно увидеть из таблицы-схемы.
Устройство электронного типа способно полностью самостоятельно производить и контролировать подачу теплоносителя в систему обогрева, но чтобы его приобрести, каждому хозяину придется выложить немалую сумму денег.
Если они случаются нередко, то стоит дополнительно устанавливать ИБП (индивидуальный блок питания) или свой выбор останавливать на механическом устройстве регулировки подачи теплоносителя. Подробнее о сервоприводах смотрите в этом видео:
Дистанционный сервопривод
Дистанционная система регулирования подачи воды является достаточно сложным электронным механизмом, который часто применяется в помещениях, где теплый пол – и основа системой отопления, которая устанавливается во всех комнатах квартиры.
Дистанционный сервопривод регулирует подачу теплоносителя в каждый контур системы. Он согласовывается с терморегуляторами, установленными в различных комнатах, которые могут отстраиваться автоматически от температуры окружающей среды, и нагревает каждое помещение по своим собственным (необобщенным) параметрам.
Организовывая такую систему отопления, многие специалисты советуют приобретать надежные и функционально наполненные терморегуляторы, которые будут подавать на сервопривод своевременные команды, на основании которых устройство сможет создать свой уникальный микроклимат (по требованию хозяина) в каждой комнате. Подробнее о дистанционных устройствах смотрите в этом видео:
Следует знать, что сервоприводы можно классифицировать еще по следующим параметрам:
- нормально закрытые;
- открытые.
В таком состоянии через сервопривод вода протекать не может. Открытое положение является противоположным описанному выше, и, наоборот, пропускает теплоноситель в систему, что не всегда приносит пользу.
Примеры кода
Программа крутит вал сначала в одну сторону, затем в другую.
// пины для подключения контактов STEP, DIR #define STEP_PIN 3 #define DIR_PIN 2 // задержка между шагами двигателя #define DELAY_STEPS 10 // количество шагов на 1 оборот #define STEP_ROUND 200 void setup() { // режим для STEP и DIR как OUTPUT pinMode(STEP_PIN, OUTPUT); pinMode(DIR_PIN, OUTPUT); // начальные значения digitalWrite(STEP_PIN, 1); digitalWrite(DIR_PIN, 0); } void loop() { // Крутимся в одну сторону digitalWrite(DIR_PIN, HIGH); // 1 оборот for(int i = 0; i < STEP_ROUND; i++) { digitalWrite(STEP_PIN, HIGH); delay(DELAY_STEPS); digitalWrite(STEP_PIN, LOW); delay(DELAY_STEPS); } // Затем меняем направление и крутимся в другую сторону digitalWrite(DIR_PIN, LOW); // сделать 1 оборот for(int i = 0; i < STEP_ROUND; i++) { digitalWrite(STEP_PIN, HIGH); delay(DELAY_STEPS); digitalWrite(STEP_PIN, LOW); delay(DELAY_STEPS); } }
Так же вы можете прочитать про подключение и настройку драйвера DRV8825, который является приемником этого драйвера на странице «Как подключить DRV8825 к Arduino».
Или приобрести товар на Aliexpress по самой выгодной цене, ссылка.
4.83/5 (9)
Сервомоторы — общая информация
Сервомоторы — один из типов двигателей , коотрые часто используются в робототехнике, мехатронных проектах, проектах на Arduino.
Положение выходного вала сервомотора определяется длиной импульса. Серва может получать импульсы каждые 20 миллисекунд. Если импульс high длится 1 миллисекунду, угол поворота сервы будет равен нулю. Если 1.5 миллисекунды, тогда серва выйдет в свое центральное положение, а если 2 миллисекунды — выйдет в положение, которое соответствует 180 градусам.

Крайние положения сервомоторов могут отличаться. Кроме того, многие сервы могут поворачиваться на 170 градусов. Есть и «continuous» сервы, которые совершают оборот на полные 360 градусов.
Элементы платы
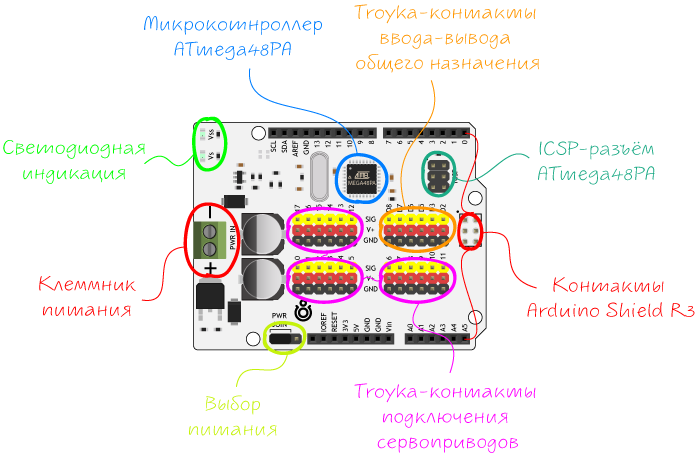
Микроконтроллер ATmega48PA
Плата Multiservo Shield выполнена на микроконтроллере ATmega48PA с прошивкой управления сервоприводами от Амперки. Чип принимает команды по I²C интерфейсу от внешней управляющей платы, например Arduino Uno или Iskra JS, и рулит до 18 сервоприводами в одно время.
Силовой клеммник питания
Для питания сервомоторов используйте клеммник под винт PWR IN.
| Силовой клеммник | Подключение |
|---|---|
| PWR + | Силовое питание |
| PWR − | Земля |
Диапазон входного напряжение должен соответствовать рабочему напряжению подключаемых сервоприводов, т.е. сколько приложили на силовой клеммник, столько и поступит на линию питания моторов. Номинальное напряжения большинства хобби сервоприводов не выходит за рамки диапазона от 5 до 12 вольт.
В качестве источника питания рекомендуем взять:
- Сборку из батареек AA:
- стационарный блок питания:
- И другие источники напряжения.
Контуры питания
На плате расширения MultiServo Shield присутствует два контура питания.
- Силовой контур Vs. Напряжение питания сервомоторов, которое поступает от . Диапазон входного напряжение должен соответствовать номинальному питанию моторов, а суммарный максимальный ток потребления не должен превышать 10 А.
- Цифровой контур Vss. Напряжение питания микроконтроллера и другой вспомогательной логики. Цифровое питание поступает через пин 5V от внешней управляющей платы, например от USB. Входное напряжение соответственно равно 5 вольт, а максимальный ток потребления не более 50 мА.
Если отсутствует хотя бы один из контуров питания Vs или Vss — Multiservo Shield работать не будет. Для информации о текущем состоянии каждого контура .
Джаммер объединения питания
На плате расширения MultiServo Shield , т.е. для работы схемы необходимо два источника напряжения.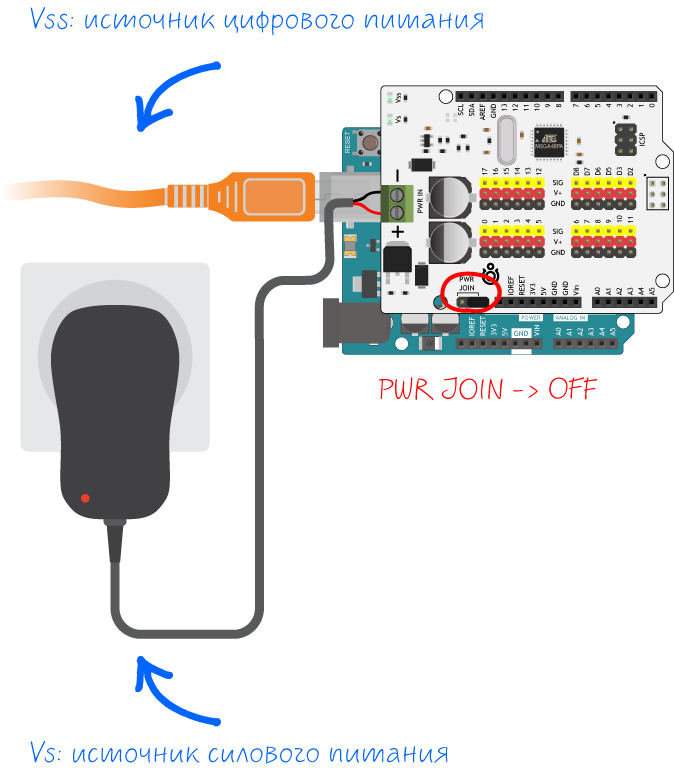
При установки джампера в положение PWR JOIN, происходит объединение положительного контакта + силового клеммника PWR IN с пином Vin управляющей платформы. Режим объединённого питания позволяет запитывать всё устройство от одного источника напряжения. 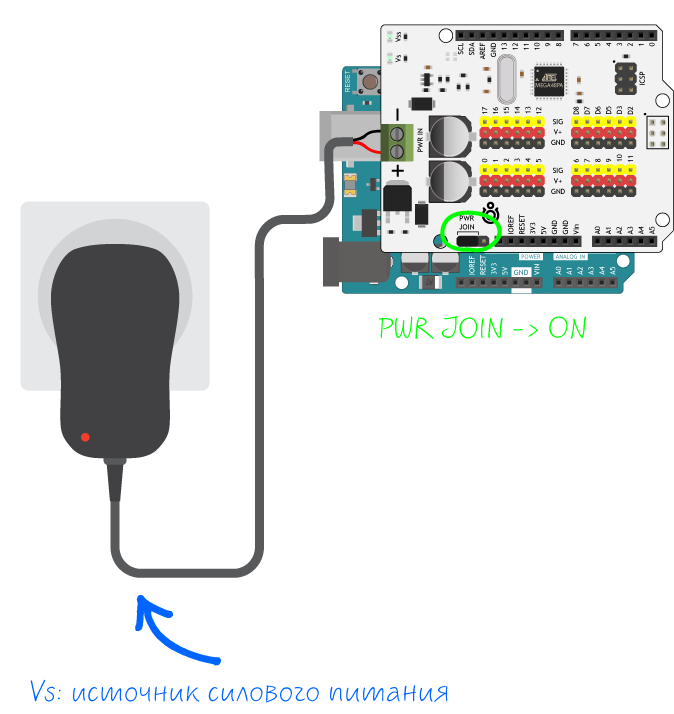
Выбор питания
При объединённом режиме PWR JOIN, напряжение на устройство может быть подано двумя способами:
- На драйвер сервомоторов через клеммник PWR IN.
- На управляющую плату через внешний DC-разъём.
Правила
При объединённом режиме PWR JOIN, важно знать:
- При работе двигателей по цепи питания может проходить большой ток, на который цепь Vin управляющей платформы может быть не рассчитана. Поэтому выбор питания через силовой клеммник PWR IN предпочтительнее.
- Источник питания должен быть способен обеспечить стабильное напряжение при резких скачках нагрузки. Даже кратковременная просадка напряжения может привести к перезагрузке управляющей платформы. В итоге программа начнётся сначала и поведения двигателей будет неадекватным.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| Vs / PON | Индикатор подачи силового питания. Горит — напряжение есть, не горит — напряжение нет. |
| Vss / ųON | Индикатор подачи цифрового питания. Горит — напряжение есть, не горит — напряжение нет. |
Troyka-контакты подключения сервоприводов
Сервоприводы подключаются к плата Multiservo Shield через контактные штыри S-V-G, где:
- S — сигнал с номером от 0 до 18.
- V — питание сервомоторов. Берется от силового клеммника.
- G — земля.
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к .
Troyka-контакты ввода-вывода общего назначения
На плате доступны шесть Troyka-контактов ввода-вывода внешнего контролера, которые можно задействовать в дополнение к основным. Контакты пронумерована S-V-G, где:
- S — сигнал с номером: D2, D3, D5, D6, D7 и D8.
- V — питание от силового клеммника.
- G — земля.
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к .
ICSP-разъём ATmega48PA
На плате расположен ICSP-разъём, который предназначен для загрузки прошивки в микроконтроллер ATmega48PA через внешний программатор. В нашем случае — это мост, который получает команды по I²C и рулит 18 сервоприводами.
Плата Multiservo Shield выполнена в форм-факторе Arduino Shield R3. а это значит расширение просто одевается сверху на управляющую платформу форм-фактора Arduino R3 методом бутерброда без дополнительных проводов и пайки. В итоге вам остаются доступны все физические контакты вашего контроллера для дальнейшего использования.
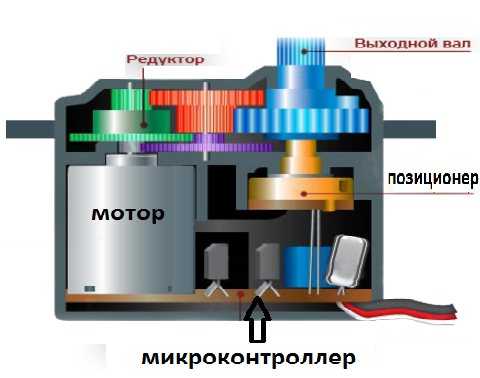
Устройство серводвигателя
В общем случае у него следующие функциональные узлы:
- Сам привод – мотор, превращающий электрическую энергию в механическую (силу поворота); для снижения скорости до необходимой снабжен редуктором, передающим крутящий момент.
- Энкодер – датчик обратной связи, преобразующий угол поворота в управляющий сигнал, контролирующий вращение выходного вала (на последнем закреплен инструмент или какой-то другой орган выполнения действия). Для решения данной задачи также хорошо подходит потенциометр, изменяющий свое сопротивление при перемещении бегунка, причем именно пропорционально, и за счет этого обеспечивающий точное позиционирование.
- Электронная начинка, принимающая входящие параметры, считывающая и сравнивающая значения, выполняющая операции включения/выключения – это тоже то, из чего состоит сервопривод; все ЭРЕ располагаются на печатной плате, которая и помогает поддерживать обратную связь и, по сути, является важнейшей частью двигателя.
- Проводка – подключение питания (два кабеля) и доставка сигнала контроля (еще один), обеспечивающий выставление правильного положения вала, а значит и используемого инструмента.
Данная конфигурация достаточно проста, чтобы обеспечивать бесперебойное поддержание режимов и оставаться надежной. Такого узла, который стал бы «слабым звеном», попросту нет, поэтому проблемы с эксплуатацией возникают сравнительно редко. Продолжительности ресурса также способствует специфика функционирования, к особенностям которой мы переходим.






