Разрешение и точность измерений
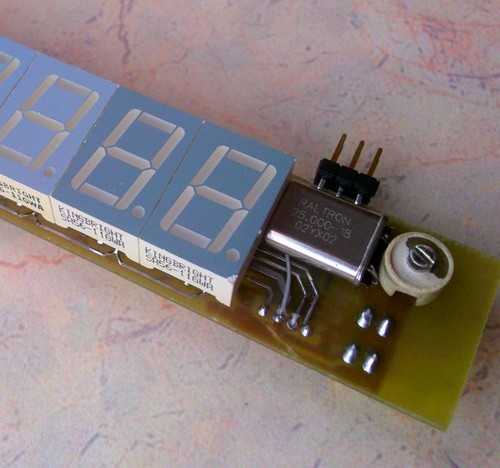
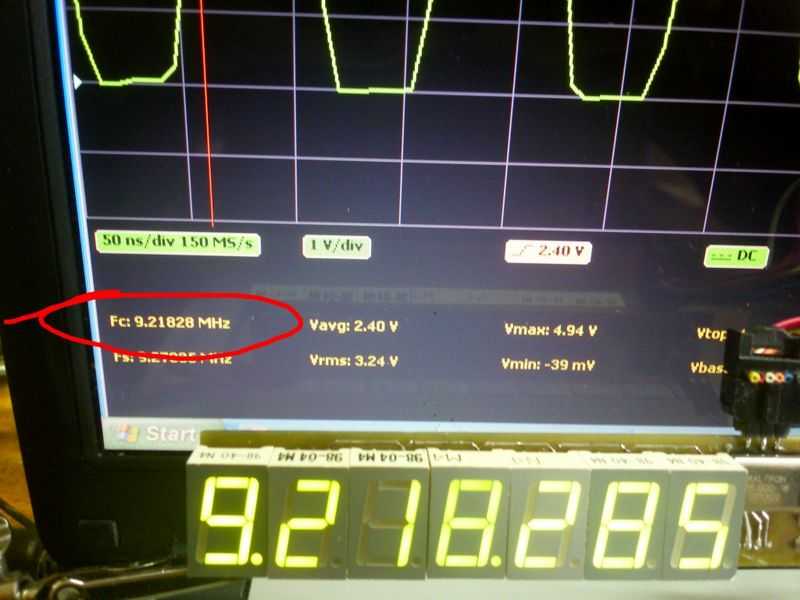
Точность измерений зависит от источника тактовой частоты для микроконтроллера. Сам по себе программный код может вносить погрешность (добавление одного импульса) на высоких частотах, но это практически не влияет на результат измерений. Кварцевый резонатор, который используется в приборе, должен быть хорошего качества и иметь минимальную погрешность. Наилучшим выбором будет резонатор, частота которого делится на 1024, например 16 МГц или 22.1184 МГц. Чтобы получить диапазон измерения до 10 МГц необходимо использовать кварцевый резонатор на частоту 21 МГц и выше (для 16 МГц, как на схеме, диапазон измерений становится немного ниже 8 МГц). Кварцевый резонатор на частоту 22.1184 МГц идеально подходит для нашего прибора, однако приобретение именно такого с минимальной погрешностью для многих радиолюбителей будет сложной задачей. В таком случае можно использовать кварцевый резонатор на другую частоту (например, 25 МГц), но необходимо выполнить процедуру калибровки задающего генератора с помощью осциллографа с поддержкой аппаратных измерений и подстроечного конденсатора в цепи кварцевого резонатора (Рисунок 3, 4).
 |
|
| Рисунок 3. | Установленный на плате подстроечный конденсатор для калибровки частоты кварцевого резонатора 25 МГц |
 |
|
| Рисунок 4. | Калибровка и сравнение результатов измерения частоты осциллографом и частотомером на AVR микроконтроллере |
В секции загрузок доступны для скачивания несколько вариантов прошивок для различных кварцевых резонаторов, но пользователи могут скомпилировать прошивку под имеющийся кварцевый резонатор самостоятельно (см. комментарии в исходном коде).
1000 и одна микроконтроллерная схема. Выпуск 1 (+CD)
1000 и одна микроконтроллерная схема. Выпуск 1 (+CD) Книга является первым выпуском своеобразной энциклопедии схем по применению микроконтроллеров. В ней представлено более 1000 электрических схем. Рассматриваются подсистемы ввода (подключение механических, емкостных, индуктивных, акустических, оптических, температурных и других датчиков), синхронизации (с использованием кварцевых и керамических резонаторов, RC и LC-генераторов), начального сброса (включая детекторы напряжения, сторожевые таймеры), а также организация питания. Все электрические схемы снабжены краткими пояснениями о назначении элементов. Главные принципы подачи материала — логичное и понятное изложение теории, дополненное большим количеством полезной практической информации.
Усилитель D-класса
Частота пилы рассматриваемых генераторов определяется емкостью C и током порта. Можем сформировать пилу с частотой сотни килогерц.
Опорный сигнал может быть как внешним, так и формироваться, например, встроенным ЦАП. Если опорный сигнал поступает с источника звука, то нам осталось совсем немного до построения усилителя класса D.
У микроконтроллеров серии PIC16F188xx есть модуль формирования комплементарных сигналов (Complementary Waveform Generator, CWG), который из входного сигнала может сформировать сигналы управления мостовой схемой.
Рис. 18. Схема усилителя класса D на микроконтроллере с использованием CIP.
Рис. 19. Диаграмма сигналов усилителя.
Итак, из таких частей ПНЯ как порт с Контролем тока выхода CCDM, Конфигурируемые Логические Ячейки CLC, Компараторы, ЦАП, формирователь комплементарных сигналов CWG мы получили усилитель класса D.
Итоги
Мы рассмотрели еще одну часть Периферии Независимой от Ядра — порты ввода/вывода микроконтроллеров Microchip. Большинство возможностей, включая переназначение функций выводов, присутствуют во многих семействах PIC16F1xxx, но новая “фича” — CCDM (управление током выходного драйвера порта), появилась совсем недавно в семействе PIC16F188xx (PIC16F18855 и др.).
Независимость от ядра заключается в том, что нам необходимо только инициализировать необходимые возможности (PPS, CCDM и др), остальное функционирование не зависит от тактовой частоты и в каком состоянии находится ядро МК (Run, Sleep, Idle или Doze). Но в процессе работы мы, тем не менее, имеем возможность изменить функционирование такой периферии.
Периферия независимая от ядра интересна сама по себе, но наибольшую пользу может принести возможность синтеза функциональных блоков, т.е. совместное использование нескольких периферийных модулей для решения конкретных задач. В этом случае тактовая частота, быстродействие и разрядность ядра уходят на второй план – аппаратная часть выполняет специализированные функции, а ядро занимается программной поддержкой изделия.
Семейства микроконтроллеров
Чаще всего встречаются микроконтроллеры следующих семейств:
- MSP430 (TI);
- ARM (ARM Limited);
- MCS 51 (INTEL);
- STMB (STMicroelectronics);
- PIC (Microchip);
- AVR (Atmel);
- RL78 (Renesas Electronics).
Одной из наиболее популярных в электронной промышленности является продукция компании Atmel, построенная на базе RISC-ядра. Первые микросхемы, разработанные в 1995 году, относятся к группе Classic. Изучать программирование микроконтроллеров AVR для начинающих желательно на более современных моделях:
- Mega — семейство мощных микросхем с развитой архитектурой.
- Tiny — недорогие изделия, имеющие восемь выводов.
Необходимо помнить, что совместимость систем команд сохраняется лишь при переносе программы с малопроизводительного МК на более мощный.
Изделия компании «Атмел» просты и понятны. Однако для использования всего функционала придется разработать программное обеспечение. Приступать к программированию микроконтроллеров AVR для начинающих рекомендуется с загрузки специализированной среды Atmel Studio. Актуальная версия предоставляется официальным сайтом производителя на бесплатной основе. Для разработки ПО в этой среде дополнительные программные компоненты не требуются.
Комплекс «Атмел Студио» включает огромное количество примеров готовых проектов. Это поможет новичку быстрее освоить базовые возможности и начать создавать собственные программы. В нем также имеются модули для компиляции и окончательной отладки кода. Параллельно с его освоением нужно изучать языки программирования. Без них разработать программное обеспечение невозможно.
Создаем устройства на микроконтроллерах
Создаем устройства на микроконтроллерах. Данная книга представляет собой практическое пособие по разработке электронных схем с применением микроконтроллеров и управляющих программ к ним. Основа книги — это ряд практических примеров, которые от простого к сложному раскрывают принципы построения схем и написания программ для микроконтроллеров. Специально разработанные примеры вводят читателя в мир программирования с самых азов, пройти по всем этапам усложнения задачи и заканчиваются описанием нескольких интересных конструкций имеющих определенную практическую ценность.
Принцип работы микроконтроллера
Несмотря на сложное устройство принцип работы микроконтроллера очень прост. Он основан на аналоговом принципе действия. Система понимает лишь две команды («есть сигнал», «нет сигнала»). Из этих сигналов в его память вписывается код определенной команды. Когда МК считывает команду, он ее выполняет.
В каждом из МК прописаны свои базовые наборы команд. И только их он способен принимать и выполнять. Сочетая отдельные команды между собой, можно написать уникальную программу, по которой будет работать любое электронное устройство именно так, как требуется.
В зависимости от содержащихся в МК набора программ, они делятся на:
Большинство контроллеров содержит RISC набор. Объясняется это тем, что такой МК проще изготовить, он дешевле и больше пользуется спросом у разработчиков электронной техники.
Таблица 1. Основные черты архитектуры
Одним из важных преимуществ RISC-архитектуры является высокая скорость арифметических вычислений. RISC-процессоры первыми достигли планки наиболее распространенного стандарта IEEE 754, устанавливающего 32-разрядный формат для представления чисел с фиксированной точкой и 64-разрядный формат «полной точности» для чисел с плавающей точкой. Высокая скорость выполнения арифметических операций в сочетании с высокой точностью вычислений обеспечивает RISC-процессорам безусловное лидерство по быстродействию в сравнении с CISC-процессорами.
Другой особенностью RISC-процессоров является комплекс средств, обеспечивающих безостановочную работу арифметических устройств: механизм динамического прогнозирования ветвлений, большое количество оперативных регистров, многоуровневая встроенная кэш-память.
Организация регистровой структуры — основное достоинство и основная проблема RISC. Практически любая реализация RISC-архитектуры использует трехместные операции обработки, в которых результат и два операнда имеют самостоятельную адресацию — R1: = R2, R3. Это позволяет без существенных затрат времени выбрать операнды из адресуемых оперативных регистров и записать в регистр результат операции. Кроме того, трехместные операции дают компилятору большую гибкость по сравнению с типовыми двухместными операциями формата «регистр — память» архитектуры CISC. В сочетании с быстродействующей арифметикой RISC-операции типа «регистр — регистр» становятся очень мощным средством повышения производительности процессора.
Вместе с тем опора на регистры является ахиллесовой пятой RISC-архитектуры. Проблема в том, что в процессе выполнения задачи RISC-система неоднократно вынуждена обновлять содержимое регистров процессора, причем за минимальное время, чтобы не вызывать длительных простоев арифметического устройства. Для CISC-систем подобной проблемы не существует, поскольку модификация регистров может происходить на фоне обработки команд формата «память — память».
Существуют два подхода к решению проблемы модификации регистров в RISC-архитектуре: аппаратный, предложенный в проектах RISC-1 и RISC-2, и программный, разработанный специалистами IВМ и Стэндфордского университета. Принципиальная разница между ними заключается в том, что аппаратное решение основано на стремлении уменьшить время вызова процедур за счет установки дополнительного оборудования процессора, тогда как программное решение базируется на возможностях компилятора и является более экономичным с точки зрения аппаратуры процессора.
Микроконтроллеры PIC
Первые микроконтроллеры PIC появились во второй половине прошлого века. Быстрые 8-разрядные микросхемы компании Microchip мгновенно завоевали популярность. Двухшинная гарвардская архитектура обеспечивает беспрецедентную скорость. Ее разрабатывали на основе набора регистров, для которого характерно разделение шин.
Выбирая язык программирования микроконтроллеров PIC, необходимо учитывать, что в основе микросхем семейства лежит уникальная конструкция RISC-процессора. Симметричная система команд позволяет произвольно выбирать метод адресации, выполнять операции в любом регистре. На данный момент компания «Микрочип» выпускает 5 разновидностей МК, которые совместимы по программному коду:
- PIC18CXXX (75 команд, встроенный аппаратный стек);
- PIC17CXXX (58 команд 16-разрядного формата);
- PIC16CXXX (35 команд, большой набор периферийных устройств);
- PIC16C5X (33 команды 12-разрядного формата, корпуса с 18–28 выводами);
- PIC12CXXX (версии с 35 и 33 командами, интегрированный генератор).
В большинстве случаев МК PIC имеют однократно программируемую память. Встречаются более дорогие модели с Flash или ультрафиолетовым стиранием. Ассортимент из 500 наименований позволяет подобрать изделие для любой задачи. Сейчас производитель концентрирует усилия на развитии 32-разрядных версий с увеличенным объемом памяти.
Языки программирования микроконтроллеров PIC — это Ассемблер и Си. Для кодирования подходят любые интегрированные среды разработки (IDE). Программировать с их помощью очень удобно. Они автоматически переводят текст программы в машинный код
Важной характеристикой IDE является возможность пошаговой симуляции работы готового ПО. Мы рекомендуем пользоваться средой разработки MPLAB
Ее созданием занималась компания Microchip.
Перед началом работы в MPLAB советуем каждый раз заводить отдельную папку. Это нужно, чтобы не запутаться в файлах проектов. Интерфейс программы интуитивно понятный, и трудностей с ним возникнуть не должно. Для отладки используются фирменные отладчики Pickit, ICD, REAL ICE, IC PROG. В них имеется возможность просмотра содержимого памяти, установки контрольных точек.
Надежность, Самодиагностика
Допустим, на плате произошло короткое замыкание между двумя портами, настроенными на выход. Если один порт будет в состоянии лог.1, а второй в лог.0, то через порт будет протекать ток. При нагрузочной способности до 25мА (реально до 50мА) через порты будет протекать большой ток, что может привести к выходу порта или контроллера из строя.
Функция ограничения тока может предотвратить повреждение порта.
В дополнение можно организовать диагностирование портов, определение нагрузки.
При необходимости тестирования порта используют подобные схемы (см. рис.2). В этом случае можно подать сигнал на один порт и считать состояние другим выводом порта. В принципе, за счет структуры портов МК Microchip, можно тестировать без внешнего резистора (подать в порт какой-либо лог. уровень и считать вход этого же порта), но при КЗ по выходу не будет ограничения тока.
Рис.2. Самотестирование порта МК.
При наличии функции ограничения тока порта мы можем обеспечить безопасное тестирование порта, так как ток КЗ будет ограничен с помощью функции CCDM.
Рис.3. Самотестирование с использованием ограничения тока порта.
Например, в программе настраиваем порт (RC7) на выход с ограничением тока, подаем лог.1, далее считываем состояние этого же порта на входе.
Считывать можем как в цифровом виде, так и с помощью АЦП, причем во втором случае можем определять сопротивление нагрузки (так как известны напряжение питания и ток через порт).
| тестирование цифровым входом | тестирование вх.АЦП |
|---|---|
Рис.4. Вывод в терминал информации тестирования порта RC7.
Возможные проблемы
Увы, даже самая идеальная техника не лишена возможных проблем, которые нет-нет, да и возникнут. Для улучшенного понимания необходимо составить список. Часть из этих проблем можно исправить вручную при детальном осмотре программатора, часть — только проверить при наличии необходимой проверочной аппаратуры. В таком случае, если программатор PIC-микроконтроллеров заводской, то вряд ли починить представляется возможным. Хотя можно попробовать найти возможные причины сбоев:
- Некачественная пайка элементов программатора.
- Отсутствие драйверов для работы с устройством.
- Повреждения внутри программатора или проводов внутри компьютера/USB.
Применение
Использование в современном микроконтроллере достаточного мощного вычислительного устройства с широкими возможностями, построенного на одной микросхеме вместо целого набора, значительно снижает размеры, энергопотребление и стоимость построенных на его базе устройств.
Используются в управлении различными устройствами и их отдельными блоками:
- в вычислительной технике: материнские платы, контроллеры дисководов жестких и гибких дисков, CD и DVD, калькуляторах;
- электронике и разнообразных устройствах бытовой техники, в которой используется электронные системы управления — стиральных машинах, микроволновых печах, посудомоечных машинах, телефонах и современных приборах, различных роботах, системах «умный дом», и др..
В промышленности:
В то время как 8-разрядные микропроцессоры общего назначения полностью вытеснены более производительными моделями, 8-разрядные микроконтроллеры продолжают широко использоваться. Это объясняется тем, что существует большое количество применений, в которых не требуется высокая производительность, но важна низкая стоимость. В то же время, есть микроконтроллеры, обладающие больши́ми вычислительными возможностями, например, цифровые сигнальные процессоры, применяющиеся для обработки большого потока данных в реальном времени (например, аудио-, видеопотоков).
расширение числа режимов работы периферийных модулей, которые задаются в процессе инициализации регистров специальных функций МК.
При модульном принципе построения все МК одного семейства содержат процессорное ядро, одинаковое для всех МК данного семейства, и изменяемый функциональный блок, который отличает МК разных моделей. Процессорное ядро включает в себя: центральный процессор; внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных и управления; схему синхронизации МК; схему управления режимами работы МК, включая поддержку режимов пониженного энергопотребления, начального запуска (сброса) и т.д.
Изменяемый функциональный блок включает в себя модули памяти различного типа и объема, порты ввода/вывода, модули тактовых генераторов (Г), таймеры. В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить и такие дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола ВКМ. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства.
Эксперименты с микроконтроллерами
Итак, всё есть. Как же начать работу с техникой, как начать прошивать микроконтроллер программатором?
- Подключить внешнее питание, присоединить всю аппаратуру.
- Первоначально необходима среда, с помощью которой всё будет делаться.
- Создать необходимый проект, выбрать конфигурацию микроконтроллера.
- Подготовить файл, в котором находится весь необходимый код.
- Подключиться к программатору.
- Когда всё готово, можно уже прошивать микроконтроллер.
Выше была написана только общая схема, которая позволяет понять, как происходит процесс. Для отдельных сред разработки она может незначительно отличаться, а более детальную информацию о них можно найти в инструкции.
Хочется отдельно написать обращение к тем, кто только начинает пользоваться программаторами. Помните, что, какими бы элементарными ни казались некоторые шаги, всегда необходимо их придерживаться, чтобы техника нормально и адекватно могла работать и выполнять поставленные вами задачи. Успехов в электронике!
Управление микроконтроллером
Управление МК может осуществляться двумя способами:
- Проводной путь. Управление исполнительными механизмами происходит через электропроводное соединение управляющих цепей и исполнительных механизмов. Включение — по нажатию кнопки на диспетчерском пункте или кнопочном пульте.
- Беспроводной путь. Такой способ управления не требует проводного соединения. С передатчика или пульта дистанционного управления (ПДУ) передается сигнал, который идет на приемник.
Сигналы беспроводного соединения могут быть:
- Оптическими. Подобными сигналами управляется домашняя бытовая техника: телевизоры или кондиционеры.
- Радио. Есть несколько вариантов: Wi-Fi, Bluetooth и др.
Развитие современных средств связи позволяет управлять контроллерами как через ПДУ, находясь в непосредственной близости к прибору, так и по интернету из любой точки мира через локальную сеть.
Обеспечивает поддержку cети Wi-Fi МК ESP 8266. В продаже он может быть в виде микросхемы или распаян, как arduino. У него 32-битное ядро, программировать его нужно через последовательный порт UART. Бывают более продвинутые платы с возможностью прошивки по USB – это NodeMCU. Они могут хранить информацию, записанную, например, с датчиков. Такие платы работают с различными интерфейсами, в т. ч. SPI, I2S.
Поддерживает большое число функций:
- планировщик задач;
- таймер;
- канал АЦП;
- формирование на выходе ШИМ сигнала;
- аудиопроигрыватель и многое другое.
Плата может быть использована как самостоятельное устройство и как модуль для беспроводной связи с Ардуино.
Тактирование микроконтроллеров
Тактовая частота МК – это количество тактов за секунду, выполняемых контроллером. Чем она выше, тем большее количество операций он может выполнить.
Существуют несколько способов тактирования МК. Они зависят от использования:
- Внутреннего RC-генератора. Он может работать только на частоте 1, 2, 4, 8 МГц. Если нужна другая частота, то он не подойдет. При необходимости использования точных временных интервалов тоже нельзя пользоваться этим методом, т. к. его задающая частота колеблется в зависимости от температуры.
- Внешнего кварца. Этот способ имеет более сложное подключение. Емкость конденсатора должна находиться в интервале 15–22 пФ. Один выход присоединяется к резонатору, а другой заземляется.
- Внешнего генератора. Этот генератор также нестабилен при разной температуре, как и внутренний.
- RС-цепочек. Для данной схемы подойдет конденсатор емкостью от 22 пФ, резистор 10–100 кОм.
Для простейших микроконтроллеров подойдут внутренний или внешний генератор и RC-цепочки. Для проектирования более точных МК потребуются стабильные источники тактирования.
Какой тип микроконтроллера выбрать для начального изучения?
Для того, что бы освоить программирование микроконтроллеров на достаточно хорошем уровне, сначала необходимо научится программировать какой-то один тип микроконтроллеров и изучить все его возможности. Тогда гораздо проще будет освоить и другие типы МК.
К основным критериям выбора МК относится:
— доступность, т. е. МК можно легко купить в любом радиомагазине;
— низкая стоимость. Здесь все понятно;
— наличие подробной технической документации;
— бесплатное программное обеспечение;
— наличие литературы и достаточного количества примеров по выбранному типу МК.
Последний пункт я выделяю как наиболее важный
Поскольку только при наличии множества наглядных и интересных примеров можно хорошо освоить программирование микроконтроллеров не теряя интерес к данному занятию, что очень важно при длительном изучении МК
https://youtube.com/watch?v=CRCm7u8xMy0
На мой взгляд, и по личному опыту всем названным критериям отвечает микроконтроллер ATmega8 компании Atmel. Его мы и возьмем за основу.
Основные возможности микроконтроллеров
Микроконтроллеры способны принимать сигналы, например с различных датчиков, кнопок или клавиатуры, обрабатывать их и выдавать управляющие сигналы, например для отображения информации на семисегментных индикаторах или жидкокристаллических дисплеях.
С помощью МК можно формировать очень точные временные интервалы благодаря наличию встроенных таймеров-счетчиков. Это позволяет создавать часы, таймеры, секундомеры и прочие устройства, где необходимо учитывать отрезки времени.
Также МК применяются для подсчета импульсов, что дает возможность сосчитать количество срабатываний какого-либо устройства. Например, можно подсчитать количество срабатываний реле с целью контроля или автоматизации определенного процесса.
Если подсчитать количество импульсов за единицу времени, то мы получим частотомер.
Наличие встроенного устройства широтно-импульсной модуляции (ШИМ) позволяет управлять частотой вращения вала двигателя.
Многие микроконтроллеры имеют в своем кристалле аналогово-цифровые преобразователи, с помощью которых можно создавать различные измерительные устройства, такие как вольтметры, амперметры, омметры, измерители емкости и т. п.
Еще микроконтроллеры могут обмениваться данными между компьютером и другим МК. Для этого практически в любом МК имеется встроенный один или несколько интерфейсов передачи данных: USART, SPI, CAN, USB и др.
Также в МК встроены и другие функциональные узлы, такие как различные прерывания, сторожевые таймеры и прочее другое. Однако я надеюсь, что даже перечисленных функций и возможностей микроконтроллеров вас заинтересует и вдохновит на их дальнейшее изучение.
Генераторы
В предыдущей статье посвященной CLC мы уже рассматривали разного рода генераторы/мультивибраторы, рассмотрим как CCDM и PPS позволит упростить и до того простые схемы основанные на ПНЯ (CLC).
Рис 5. Мультивибратор на двух гейтах.
На рис.5 изображен ранее рассмотренный генератор на D триггере, инверторе и RC цепочке (в данном случае схема чуть перерисована для отображения внешних по отношению к микроконтроллеру подключений). Частота генератора определяется параметрами R и C. Резистор R задает ток заряда/разряда конденсатора C. Теперь, при наличии встроенного контроллера тока драйвера порта, мы можем убрать резистор и чуть упростить схему.
Прим. Далее на рисунках выход порта с функцией CCDM будет обозначаться в виде резистора с подписью CCDM
Рис.6. Мультивибратор с ограничением выходного тока порта CLC2
Следует отметить, что совсем не обязательно для CLC1 использовать D триггер, пойдет любой вариант реализации неинвертирующего гейта.
Рис. 7. Другой вариант мультивибратора на двух логических гейтах.
Возможность избавиться от одного резистора это не та цель, ради которой стоило бы рассматривать данную тему, но в данном примере мы дополнительно имеем следующее:
-
уменьшение используемого числа выводов МК (да, вы же помните что у нас есть часть ПНЯ в виде PPS), то есть для одного и того же корпуса можем иметь больше возможностей — впихнуть больше в меньшее.
- возможность программного изменения частоты! Если мы меняем ток заряда/разряда конденсатора, то мы меняем скорость изменения напряжения на конденсаторе, а значит частоту переключения мультивибратора.
Рис. 8. Управление током позволяет программно менять частоту мультивибратора.
В первоначальной схеме от микроконтроллера понадобилось бы 3 вывода, модифицированная схема с использованием PPS и CCDM требует только 2.
На самом деле мультивибратор можно сделать и на одном гейте (рис.9), тогда от микроконтроллера понадобится вообще один внешний выход. Выход CLC можно подключить внутри МК к другой периферии. На конденсаторе мы будем видеть треугольный сигнал, но мы можем убедиться в том, что на выходе CLC все же присутствует последовательность из “нулей” и “единиц”, если выход той же самой CLC вывести на другой “контрольный” вывод МК с помощью PPS.
Рис.9. Мультивибратор на одном гейте
Рис.10. Форма сигнала на конденсаторе мультивибратора и контрольный выход логического элемента.
Микроконтроллеры ARM
Микроконтроллеры с ядром ARM также являются одним из семейств процессоров на базе архитектуры RISC, разработанным компанией Advanced RISC Machines (ARM).
Микроконтроллеры ARM основаны на 32-битных и 64-битных многоядерных процессорах RISC. Процессоры RISC предназначены для выполнения меньшего количества инструкций, чтобы они могли работать с большей скоростью, выполняя дополнительные миллионы инструкций в секунду (MIPS). Устраняя ненужные инструкции и оптимизируя обработку информации, RISC-процессоры обеспечивают большую производительность по сравнению с большинством рассмотренных выше микроконтроллеров.
Процессоры ARM широко используются в потребительских электронных устройствах, таких как смартфоны, планшеты, мультимедийные проигрыватели и другие мобильные устройства. Из-за сокращенного набора команд им требуется меньше транзисторов, что позволяет уменьшить размер матрицы интегральной схемы. Процессоры ARM с меньшими размерами уменьшают сложность проектирования и сокращают энергопотребление, что делает их пригодными для более миниатюрных устройств.





