Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Итак, для начала сформулируем определение. Согласно Википедии: «Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора».
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
В приведенном выше определении было сказано «…вызывает дискретные угловые перемещения (шаги) ротора…» — это значит, что ротор шагового двигателя не вращается в обычном понимании, а поворачивается на какой-то определенный, «дискретный» угол. Этот угол называется шагом, отсюда и название «шаговый двигатель». Мне нравится еще одно название этих устройств — «двигатель с конечным числом положений ротора».
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
- Реактивные.
- С постоянными магнитами.
- Гибридные.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают бОльшую мощность по сравнению с униполярными.
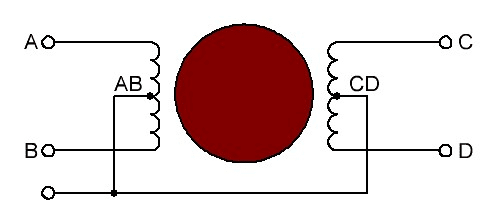
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
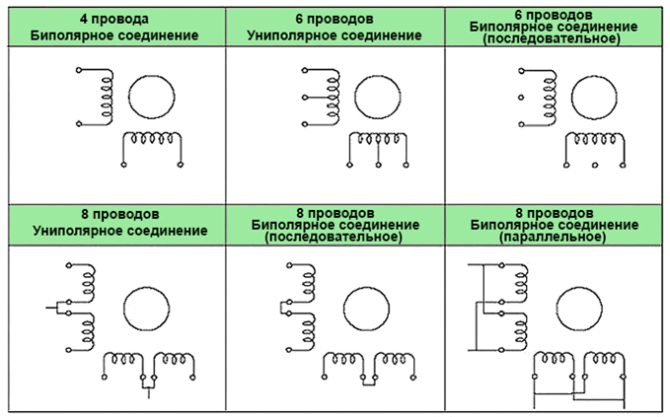
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
- Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
- Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
Полношаговое управление
Полушаговое управление
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Объяснение программы для платы Arduino
Перед тем как начать писать программу для платы Arduino давайте разберемся что должно происходить внутри этой программы. Как мы уже говорили ранее, мы будем использовать метод 4-шаговой последовательности, то есть нам нужно будет сделать 4 шага чтобы выполнить один полный оборот двигателя.
| Номер шага | Контакты, на которое подается питание | Катушки, на которое подается питание |
| Шаг 1 | 8 и 9 | A и B |
| Шаг 2 | 9 и 10 | B и C |
| Шаг 3 | 10 и 11 | C и D |
| Шаг 4 | 11 и 8 | D и A |
На драйвере мотора есть 4 светодиода, по свечению которых можно судить о том, на какую катушку подается питание в конкретный момент. Более подробно все эти процессы можно посмотреть в видео, приведенном в конце статьи.
Мы напишем программу, в которой необходимое количество шагов для двигателя мы будем вводить в мониторе последовательного порта (serial monitor) платы Arduino. Полный текст программы приведен в конце статьи, здесь же мы рассмотрим наиболее важные его фрагменты.
Как мы рассчитали ранее, полное число шагов для полного оборота нашего шагового двигателя, равно 32, пропишем это в следующей строчке кода:
#define STEPS 32
Далее мы должны сказать плате Arduino через какие ее контакты мы будем управлять шаговым двигателем (то есть к каким ее контактам подключен драйвер мотора).
Stepper stepper (STEPS, 8, 10, 9, 11);
Примечание: последовательность номеров контактов, указанная в приведенной команде (8,10,9,11) – специально упорядочена таким образом чтобы подавать питание на катушки шагового двигателя в правильном порядке. Если вы измените номера контактов, к которым подключен шаговый двигатель, то вы соответствующим образом должны их упорядочить для подачи в приведенную команду.
Мы будем использовать специальную библиотеку для работы с шаговыми двигателями, поэтому для задания скорости вращения шагового двигателя мы можем использовать команду вида:
stepper.setSpeed(200);
Для двигателя 28-BYJ48 скорость вращения можно установить в диапазоне от 0 до 200.
Теперь, чтобы двигатель сделал один шаг, мы можем использовать следующую команду:
stepper.step(val);
Количество шагов, которое должен сделать двигатель, определяется переменной “val”. Поскольку мы имеем 32 шага (для оборота) и передаточное число 64 мы должны сделать 2048 (32*64=2048) “шагов” в этой команде для совершения одного полного оборота двигателя.
Соответственно, чтобы шаговый двигатель сделал один шаг по часовой стрелке, необходимо использовать команду:
stepper.step(1);
А один шаг против часовой стрелки:
stepper.step(-1);
В нашей программе мы будем считывать значение на аналоговом контакте A0 платы Arduino и сравнивать его с предыдущим значением (Pval). Если оно увеличилось, то мы будем делать 5 шагов двигателем по часовой стрелке, а если уменьшилось – то 5 шагов двигателем против часовой стрелки.
potVal = map(analogRead(A0),0,1024,0,500); if (potVal>Pval) stepper.step(5); if (potVal stepper.step(-5); Pval = potVal;
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
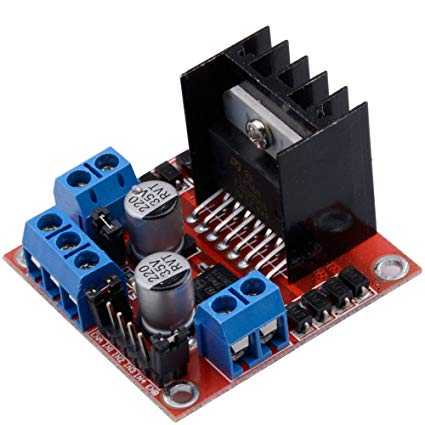
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003

Описание драйвера шаговых двигателей UNL2003 Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение Nema 17 через A4988
Подключение было реализовано на основании этой темы на Arduino форуме. Рисунок приведен ниже.
Собственно, данная схема присутствует практически на каждом блоге-сайте, посвященном Arduino. Плата была запитана от 12 вольтового источника питания. Но двигатель не вращался. Проверили все соединения, еще раз проверили и еще раз.
Первая проблема
Наш 12 вольтовый адаптер не выдавал достаточной силы тока. В результате адаптер был заменен на 8 батареек АА. И двигатель начал вращаться! Что ж, тогда захотелось перескочить с макетной платы на прямое подключение. И тут возникла
Вторая проблема
Когда все было распаяно, двигатель опять перестал двигаться. Почему? Не понятно до сих пор. Пришлось вернуться к макетной плате. И вот тут возникла вторая проблема. Стоит предварительно было посидеть на форумах или внимательно почитать даташит. Нельзя подключать-отключать двигатель когда на контроллер подано питание! В результате контроллер A4988 благополучно сгорел.
Эта проблема была решена покупкой нового драйвера на eBay. Теперь, уже с учетом накопленного грустного опыта, Nema 17 был подключен к A4988и запущен, но.
Шаговый двигатель от CD-ROM — запуск на Arduino без драйвера
Добрый вечер ребята. У меня такой вопрос. Как правильно подключить и запустить на ардуино шаговый двигатель от дисковода без драйвера и как урправлять реверсом? Заранее всем откликнувшимся большое спасибо за помощь.
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Там нет шагового двигателя. Там три других двигателя: один обычный коллекторный моторчик, который открывает/закрывает каретку. И два трёхфазных бесколлекторных двигателя: один крутит диск (побольше), другой двигает лазерную головку (поменьше).
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Хмм . А я видел привод каретки и от коллекторного и от шагового движков.
шаговый был обычный биполярный. Подключение много раз обсуждалось
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Меня значит интересует тот который двигает лазерную головку ( у него 4 контакта). Как его можно подключить без драйвера к ардуино и сделать реверс программно??
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Похоже я ошибся и двигатель, который двигает головку всё-таки биполярный шаговый.
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Спасибо за ролики я первый смотрел уже, там через драйвер. Можно ли обойтись без драйвера?
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
А как можно реализовать через ардуино реверс обычного постоянного мотора (например от лотка дисковода)? Мотор собираюсь запускать через транзистор подавая на базу сигнал с ардуино. Спасибо за вашу помощь заранее.
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Через транзистор реверсить не получится надо или мост или полумост.
вообщетто непонятно , как Вы нашли этот форум, если не умеете пользоваться поиском?
а если умеете то почему не ищете сами?
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Поиском я умею пользоваться но там советуют в других форумах через драйвер. Как вот можно обычный постоянный мотор реверсить без драйвера . Подключать хочу его к ардуино и задавать реверс цифровым выходом (пинами)
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Спасибо вам. через Н-мост попробую Но я так понимаю если случайно запусить оба транзистора то будет короткое замыкание цепи (например нажал на пульте две кнопки Вперед и Назад одновременно).
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Да, будет коротыш. Именно роэтому лучше применить мелкосхему, там есть защита.
откуда такой антагонизм к драйверам? Драйвер на мелкосхеме — тот же Нмост с защитами и в одном корпусе. Очень удобно.
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Да не антагонизм к драйверам. Просто нет в наличии пока. А так понимаю что очень удобно
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Хмм. L293 достаточно распрострненная и недорогая. На ебээ вообще копейки стоит.
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Заказать собираюсь либо на алике или а ебее
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Спасибо за совет вам. Вопрос такой L293 может управлять 12В моторами? Какое количество моторов можно задействовать максимально. Я так понимаю он служит вроде ключа для открывания (пропукскания) питания на моторы, а также реверсы делать.
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
В даташите всё написано:
Wide Supply-Voltage Range: 4.5 V to 36 V Output Current 1 A Per Channel (600 mA for L293D) Peak Output Current 2 A Per Channel (1.2 A for L293D)
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
БЛАГОДАРЮ ВСЕХ ЗА ОКАЗАННУЮ ВАМИ МНЕ ПОМОЩЬ))))))))))))))))))))))))))))))))))
Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Там нет шагового двигателя. Там три других двигателя: один обычный коллекторный моторчик, который открывает/закрывает каретку. И два трёхфазных бесколлекторных двигателя: один крутит диск (побольше), другой двигает лазерную головку (поменьше).
Не будьте столь категоричны: недавно разбирал CD-Drive, так там головку двигает мотор, к которому идет ровно 2 провода — красный и черный. Вы уверены, что это трехфазный бесколлекторный?
Скетч Arduino — использование библиотеки AccelStepper
Управление шаговым двигателем без библиотеки идеально подходит для простых приложений с одним двигателем. Но если вы хотите управлять несколькими шаговыми двигателями, то вам понадобится библиотека.
Итак, для нашего следующего эксперимента мы будем использовать расширенную библиотеку шаговых двигателей под названием AccelStepper library. Она поддерживает:
- Ускорение и замедление.
- Одновременное управление несколькими шаговыми двигателями с независимым шагом для каждого двигателя.
Эта библиотека не включена в IDE Arduino, поэтому вам необходимо сначала установить ее.
Установка библиотеки
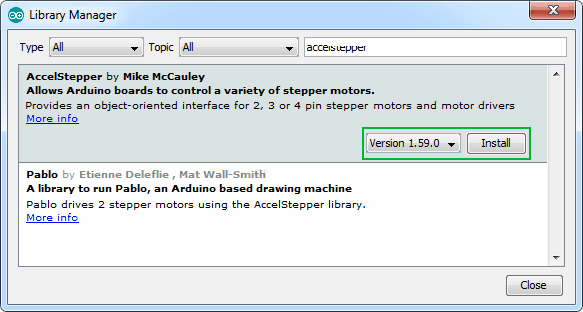
Чтобы установить библиотеку, перейдите в Эскиз> Include Library> Manage Libraries… Подождите, пока диспетчер библиотек загрузит индекс библиотек и обновит список установленных библиотек.
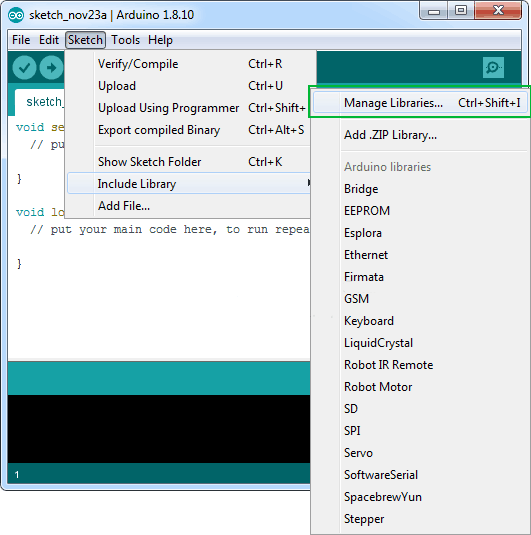
Отфильтруйте результаты поиска, набрав «Accelstepper». Щелкните первую запись и выберите «Установить».
Скетч Arduino
Вот простой код, который ускоряет шаговый двигатель в одном направлении, а затем замедляется, чтобы остановиться. Как только двигатель совершает один оборот, он меняет направление вращения. И он повторяет это снова и снова.
// Подключаем библиотеку AccelStepper
#include <AccelStepper.h>
// Устанавливаем выводы
const int dirPin = 2;
const int stepPin = 3;
// Определение тип интерфейса двигателя
#define motorInterfaceType 1
// Создаем экземпляр
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
void setup() {
// Устанавливаем максимальную скорость, коэффициент ускорения,
// начальную скорость и целевую позицию
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(200);
}
void loop() {
// Изменение направления вращения, когда двигатель достигнет целевого положения
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
// Передвинуть на 1 шаг
myStepper.run();
}
Пояснение к скетчу:
Мы начинаем с подключения недавно установленной библиотеки AccelStepper.
#include <AccelStepper.h>
Определяем выводы Arduino, к которым подключаются выводы STEP и DIR A4988. Устанавливаем motorInterfaceType значение 1. (1 означает внешний шаговый драйвер с выводами Step и Direction).
const int dirPin = 2; const int stepPin = 3; #define motorInterfaceType 1
Затем мы создаем экземпляр библиотеки с именем myStepper.
AccelStepper myStepper(motorInterfaceType, stepPin, dirPin);
В функции setup() мы сначала устанавливаем максимальную скорость двигателя 1000. Затем мы устанавливаем коэффициент ускорения для двигателя, чтобы добавить ускорение и замедление к движениям шагового двигателя.
Затем мы устанавливаем обычную скорость 200 и количество шагов, например, 200 (поскольку NEMA 17 совершает 200 шагов за оборот).
void setup() {
myStepper.setMaxSpeed(1000);
myStepper.setAcceleration(50);
myStepper.setSpeed(200);
myStepper.moveTo(200);
}
В функции loop() мы используем оператор If, чтобы проверить, как далеко двигателю нужно проехать (путем чтения distanceToGo), пока он не достигнет целевой позиции (moveTo). Как только distanceToGo станет равен нулю мы переключаем двигатель в противоположное направление, изменив moveTo на противоположное значение относительно его текущего положения.
Теперь в конце цикла мы вызываем функцию run(). Это самая важная функция, поскольку шаговый двигатель не будет работать, пока эта функция не будет выполнена.
void loop() {
if (myStepper.distanceToGo() == 0)
myStepper.moveTo(-myStepper.currentPosition());
myStepper.run();
}
Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
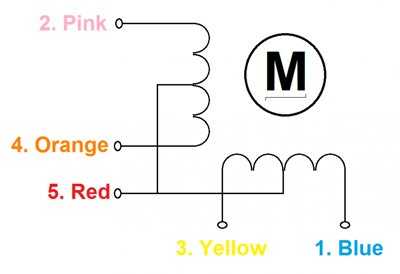
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
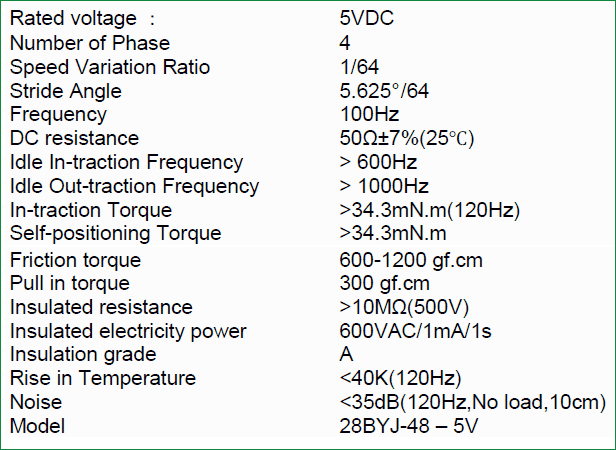
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать. В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°
Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25)
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
#include <Stepper.h> // библиотека для шагового двигателя // количество шагов на 1 оборот, измените значение для вашего мотора const int stepsPerRevolution = 200; // устанавливаем порты для подключения драйвера Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); void setup() { myStepper.setSpeed(60); // устанавливаем скорость 60 об/мин } void loop() { // поворачиваем ротор по часовой стрелке myStepper.step(stepsPerRevolution); delay(500); // поворачиваем ротор против часовой стрелки myStepper.step(-stepsPerRevolution); delay(500); }
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
#include // библиотека для шагового двигателя
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
AccelStepper mystepper(DRIVER, step, direction);// Шаговый двигатель, управляемый платой AccelStepper mystepper(FULL2WIRE, pinA, pinB);// Шаговый двигатель, управляемый Н-мостом AccelStepper mystepper(FULL4WIRE, pinA1, pinA2, pinB1, pinB2);// Униполярный двигатель mystepper.setMaxSpeed(stepsPerSecond);// Установка скорости оборотов в минуту mystepper.setSpeed(stepsPerSecond);// Установка скорости в шагах за секунду mystepper.setAcceleration(stepsPerSecondSquared);// Установка ускорения
mystepper.currentPosition(); // Возвращает текущее положение в шагах mystepper.setCurrentPosition (long position); Обнуляет текущую позицию до нуля mystepper.targetPosition(); // Конечное положение в шагах mystepper.distanceToGo(); // Вернуть расстояние до указанного положения mystepper.moveTo(long absolute); // Переместиться в абсолютно указанное положение mystepper.move(long relative); // Переместиться в относительно указанное положение
mystepper.run(); // Начать движение с ускорением, функцию следует вызывать повторно mystepper.runToPosition(); // Начать движение до указанной точки mystepper.runToNewPosition(); // Начать движение с ускорением до заданной позиции mystepper.stop(); // Максимально быстрая остановка (без замедления) mystepper.runSpeed(); // Начать движение с заданной скоростью без плавного ускорения mystepper.runSpeedToPosition(); // Начать движение без плавного ускорения, до позиции
mystepper.disableOutputs(); // Деактивирует зарезервированные пины и устанавивает их в режим LOW. Снимает напряжение с обмоток двигателя, экономя энергию mystepper.enableOutputs(); // Активирует зарезервированные пины и устанавивает их в режим OUTPUT. Вызывается автоматически при запуске двигателя





