Принцип работы ШИМ
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
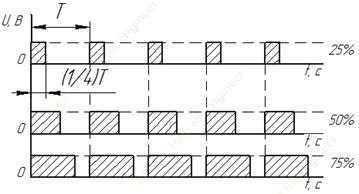
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:. Скважность ШИМ
Скважность ШИМ
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
T(перод) = 1/f(частота)
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
Управление по току с пропорциональным управлением
При этом способе управления переменная скважность ШИМ зависит от выходного напряжения и активного фильтра обратной связи
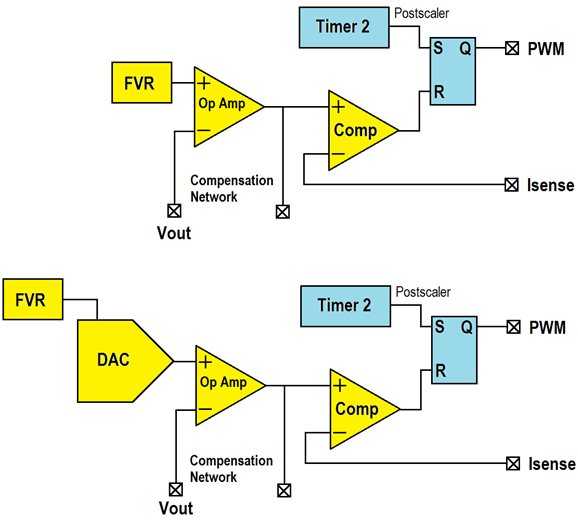
Рис. 12. ШИМ контроллер с управлением по току с пропорциональным управлением. Вариант с фиксированным и с регулируемым выходным напряжением.
В данном методе наблюдается нестабильность петли обратной при скважности выше 50% (появление генерации на частоте ½ Fswx, зависит от шума на Vin или Vout). Данный процесс хорошо изучен и проблема решается уменьшением усиления в петле обратной связи, что можно обеспечить двумя способами (рис.13):
- добавлением пилообразного напряжения к Isense;
- вычитанием пилообразного напряжения из выхода петлевого фильтра.
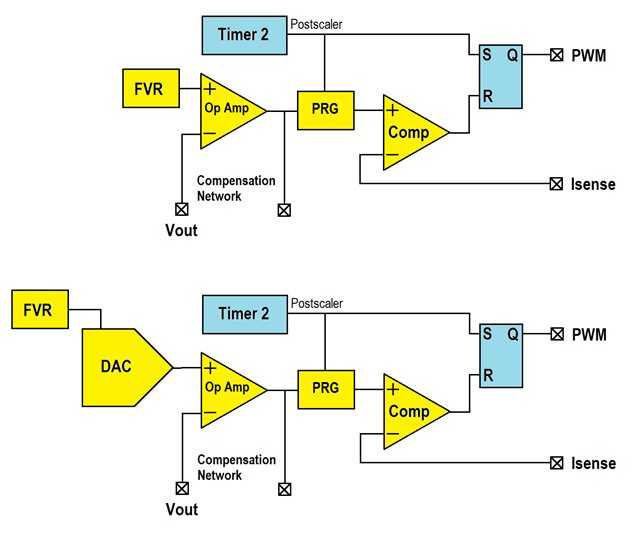
Рис.13. Добавление модуля формирования пилообразного напряжения (PRG) в ШИМ контроллер для устранения нестабильности петли обратной связи. Вариант с фиксированным и с регулируемым выходным напряжением.
Контроллеры Microchip для преобразователей энергии, как составную часть CIP имеют программируемый генератор пилообразного напряжения (Programmable Ramp Generator, PRG или Slope Compensation).
Модуль PRG позволяет формировать пилообразное напряжение с независимой регулировкой фронта и спада, в качестве запускающих сигналов могут использоваться различные внутренние и внешние сигналы.
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие
Вот их некоторые особенности:
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять
Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение
Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Читать также: Мини снегоходы самоделки своими руками видео бесплатно
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
В большинстве современных электронных устройств практически не используются аналоговые (трансформаторные) блоки питания, им на смену пришли импульсные преобразователи напряжения. Чтобы понять, почему так произошло, необходимо рассмотреть конструктивные особенности, а также сильные и слабы стороны этих устройств. Мы также расскажем о назначении основных компонентов импульсных источников, приведем простой пример реализации, который может быть собран своими руками.
Суть ШИМ
Аббревиатура ШИМ означает Широтно Импульсную Модуляцию. Это определение относится к электротехнике и электронике. Но физическое явление, которое лежит в основе ШИМ, существовало всегда. Речь идет об инерционности распространения тепла в различных средах. Простейший и наглядный пример – это картофель, запеченный в костре. Горячую картофелину перебрасывают из руки в руку тем чаще, чем она горячее. Тем самым уменьшая поток тепла от картофелины к руке и предотвращая ожог.
Ширина импульса – это значение времени. А если этот импульс характеризует изменение энергии, ее действующее значение эквивалентно площади, ограниченной линией импульса. Например, прямоугольный импульс связан с высотой (амплитудой) и шириной (временем). Поэтому одну и ту же площадь, а, следовательно, и количество энергии, можно получить, либо уменьшая амплитуду и увеличивая ширину импульса, либо наоборот, – увеличивая амплитуду и уменьшая время (ширину).
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным
Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
обеспечивает режим плавного пуска преобразователя; ограничивает амплитуду и скважность управляющих импульсов; контролирует уровень входного напряжения; защищает от короткого замыкания и превышения температуры силового ключа; при необходимости переводит устройство в дежурный режим
Схема №1
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора
Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И
В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
H-мосты
ШИМ часто используется в сочетании с H-мостом. Эта схема названа так, потому что она напоминает букву H и позволяет удвоить эффективное напряжение на нагрузке, поскольку источник питания можно переключать в обе стороны от нагрузки. В случае индуктивных нагрузок, таких как двигатели, для подавления индуктивных пиков, способных повредить транзисторы, используются диоды. Индуктивность в двигателе также имеет тенденцию устранять высокочастотную составляющую сигнала. Данная схема также может использоваться с динамиками для аудиоусилителей класса D.
Несмотря на простоту, схема H-моста имеет один серьезный недостаток, при переходе между полевыми транзисторами возможен одновременный запуск обоих транзисторов сверху и снизу моста, что позволит полностью нагрузить блок питания. Это условие называется прострел (shoot through) и может возникнуть с любым типом транзисторов, используемых в H-мосте. Если источник питания достаточно мощный, транзисторы выйдут из строя. Поэтому перед транзисторами используются драйверы, которые запирают один транзистор перед тем, как открыть другой.
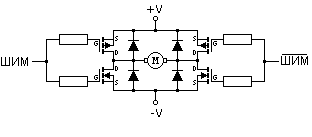 Рисунок 4 – Упрощенный H-мост
Рисунок 4 – Упрощенный H-мост
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
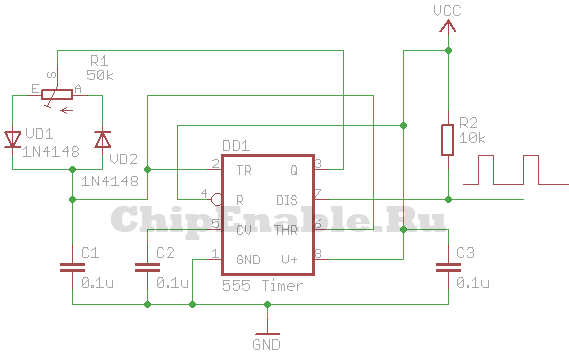
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
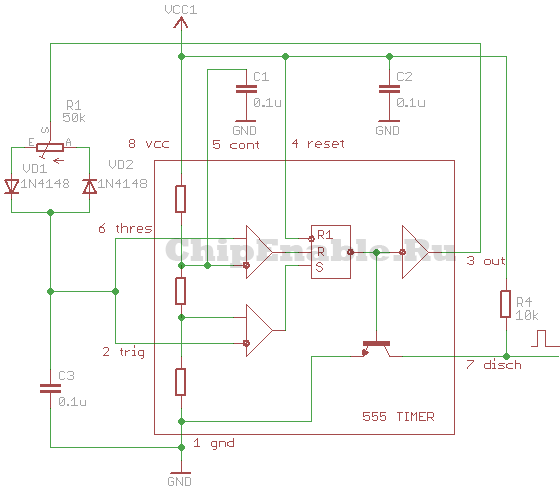
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Что такое ШИМ сигнал
ШИМ – это сигнал с различными интервалами ON и OFF сигнала (различными продолжительностями включения). Время, в течение которого сигнал имеет высокий уровень, называется временем включения (“on time”), а время, в течение которого сигнал имеет низкий уровень — время выключения (“off time”). У ШИМ сигнала есть два параметра, которые мы рассмотрим далее.
Коэффициент заполнения (скважность) ШИМ
Процент времени, в течение которого ШИМ сигнал имеет высокий уровень, называется коэффициентом заполнения (скважностью). К примеру, коэффициент заполнения ШИМ сигнала с периодом (длительностью) 100 мс, в котором в течение 50 мс сигнал имеет высокий уровень и в течение 50 мс имеет низкий уровень, равен 50%
Аналогично, если для такой же длительности (100 мс) сигнал 25 мс остается на высоком уровне и 75 мс на низком, то коэффициент заполнения для такого сигнала будет равен 25%. Для его определения нам необходимо знать только длительность высокого уровня сигнала (длительность низкого уровня легко определить как разность между периодом сигнала и длительность сигнала высокого уровня). Более наглядно ШИМ сигнал представлен на следующем рисунке.
Формула для расчета коэффициента заполнения/скважности (Duty Cycle) выглядит следующим образом:
Duty Cycle (%) = On Time/(On Time + Off Time)
Таким образом, изменяя коэффициент заполнения ШИМ сигнала мы можем изменять интенсивность свечения светодиода.
Выбор режима ШИМ
После выбора нужного нам коэффициента заполнения необходимо выбрать еще режим ШИМ – то есть то, каким образом ШИМ будет работать. Существует три типа ШИМ:
- Быстрая ШИМ (Fast PWM).
- ШИМ с коррекцией фазы (Phase Correct PWM).
- ШИМ с коррекцией фазы и частоты (Phase and Frequency Correct PWM).
Быстрая ШИМ используется в случаях когда нам не важна фаза импульсов, например, управление скоростью вращения двигателя или яркостью свечения светодиода.
Для генерации быстрой ШИМ нам необходимо будет запустить на таймере счет и когда он досчитает до определенного значения сбрасывать значение таймера снова в ноль. Таким образом мы установим период следования ШИМ импульсов. Таким образом мы можем контролировать импульс, устанавливая высокое значение сигнала когда счетчик таймера досчитает до определенного значения. А когда счетчик будет возвращаться в 0 на это время сигнал будет низкого уровня. Таким образом, мы имеем большую гибкость в управлении ШИМ сигналом используя всего лишь один таймер.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Все микропроцессоры работают с цифровыми сигналами, т.е. с логическим нулем (0 В), или логической единицей (5 В или 3.3 В). Поэтому микропроцессор не может сформировать на выходе промежуточное напряжение. Использование для этих целей внешних ЦАП (www.drive2.ru/b/2558751/) — сложно и задействует сразу много ножек микропроцессора, что неудобно. В этих случаях применяют Широтно-импульсную модуляцию (ШИМ, англ
pulse-width modulation (PWM)) — процесс управления мощностью, подводимой к нагрузке, путём изменения скважности импульсов, при постоянной частоте. Широтно-импульсная модуляция представляет собой периодический импульсный сигнал.Существуют цифровые и аналоговые ШИМ
Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:Uоп – опорное (пилообразное, треугольное) напряжение;Uупр – входное постоянное напряжение.Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
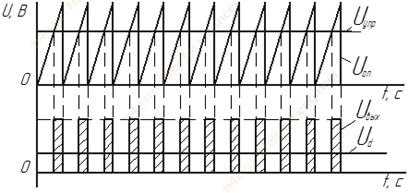
Период тактирования T определяет через какие промежутки времени подаются импульсы.
Длительность импульса — величина показівающая время в течении которого подается сигнал t, с;
Скважность — Соотношение длины импульса (τ) к периоду тактирования (T); пропорционально модулирующей величине. Коэффициент заполнения обычно отображают в процентах (%)
Коэффициент заполнения D – величина обратная скважности.Несмотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается.Эти величины безразмерны. PS ШИМ может быть реализован не только при помощи микроконтроллеров, но и на аналоговой базе
Например, простейший ШИМ на основе мультивибратора из двух транзисторов:
PS ШИМ может быть реализован не только при помощи микроконтроллеров, но и на аналоговой базе. Например, простейший ШИМ на основе мультивибратора из двух транзисторов:
Плюсы и минусы ШИМ
Начнем с плюсов, ведь не зря же сегодня каждый второй, а то и первый БП применяет ШИМ. Как вы уже поняли, это экономично, а значит БП не будет греться! Кроме того это получится компактно по размеру и минимально по массе, при этом еще в некоторых случаях и дешевле. Еще одним важным плюсом будет более длительный режим работоспособности полупроводников. Все дело в том, что полупроводники со временем деградируют, их характеристики падают – изменяются. При этом деградация полупроводниковых переходов прямо пропорционально времени их работы. А если они часть своего времени «отдыхают», то и проработают дольше. Теперь о минусах. ШИМ контроллеры могут давать помехи. Именно от них часто может возникать рябь на экране, либо шумы в динамике. Из-за возможных шумов их никогда не применяют для высококачественной звуковой аппаратуры. Там только «честные» трансформаторы, да и то желательно с сердечником в виде тора. БП на ШИМ сложнее по своей схемотехнике. Неисправности в них сложнее диагностировать и находить.
Диагностика неисправностей
Одна из часто встречающихся проблем — пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта — обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует — отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального — проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах — некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков — обрыв петли ООС или цепочки RC, деградация емкости фильтра.
Увеличение частоты и разрядности ШИМ Ардуино
Для изменения частоты ШИМа Ардуино в большую сторону необходимо обратиться к следующей инструкции.
Когда высокочастотный ШИМ-сигнал фильтруется, его небольшой компонент всегда будет проходить через фильтр. Это происходит потому, что конденсатор слишком мал, чтобы полностью его фильтровать. Можно было бы выбрать большую комбинацию конденсаторов и резисторов, но тогда потребуется долгое время для достижения надлежащего выходного напряжения при зарядке конденсатора.
Это значительно ограничило бы то, как быстро сигнал может измениться и быть видимым на выходе. Поэтому нужно выбрать разумное значение напряжения пульсации. Популярным приложением было бы изменение напряжения MOSFET. Поскольку МОП-транзисторы являются устройствами, контролирующими напряжение, можно легко управлять ими с помощью нашего микроконтроллера с ШИМ и фильтром нижних частот. На выходе будет присутствовать любое пульсационное напряжение, присутствующее на входе.
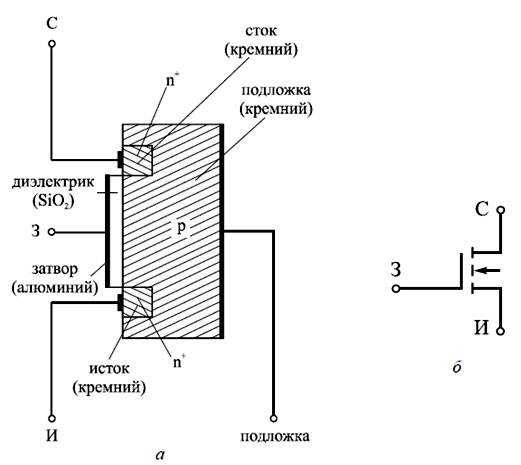 Рис.: а) структура МОП ПТ с индуцированным каналом. б) графическое изображение.
Рис.: а) структура МОП ПТ с индуцированным каналом. б) графическое изображение.
В этом примере предположим, что MOSFET будет управлять не критической нагрузкой, такой, как светодиод высокой мощности. В этом случае нам просто нужно оставаться в разумных пределах, поэтому пиковый ток в светодиоде не будет превышен. В этом случае пульсация в 0,1 вольта была бы более чем достаточной.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Как работает инвертор?
ВЧ модуляцию, можно сделать тремя способами:
- частотно-импульсным;
- фазо-импульсным;
- широтно-импульсным.
На практике применяется последний вариант. Это связано как с простотой исполнения, так и тем, что у ШИМ неизменна коммуникационная частота, в отличие от двух остальных способов модуляции. Структурная схема, описывающая работу контролера, показана ниже.
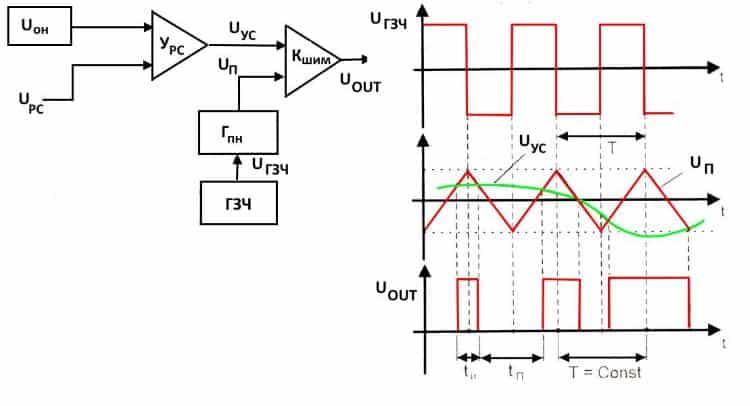
Структурная схема ШИМ-контролера и осциллограммы основных сигналов
Алгоритм работы устройства следующий:
Генератор задающей частоты формирует серию прямоугольных сигналов, частота которых соответствует опорной. На основе этого сигнала формируется UП пилообразной формы, поступающее на вход компаратора КШИМ. Ко второму входу этого устройства подводится сигнал UУС, поступающий с регулирующего усилителя. Сформированный этим усилителем сигнал соответствует пропорциональной разности UП (опорное напряжение) и UРС (регулирующий сигнал от цепи обратной связи). То есть, управляющий сигнал UУС, по сути, напряжением рассогласования с уровнем, зависящим как от тока на грузке, так и напряжению на ней (UOUT).
Читать также: Проверка емкости аккумулятора мультиметром
Данный способ реализации позволяет организовать замкнутую цепь, которая позволяет управлять напряжением на выходе, то есть, по сути, мы говорим о линейно-дискретном функциональном узле. На его выходе формируются импульсы, с длительностью, зависящей от разницы между опорным и управляющим сигналом. На его основе создается напряжение, для управления ключевым транзистором инвертора.
Процесс стабилизации напряжения на выходе производится путем отслеживания его уровня, при его изменении пропорционально меняется напряжение регулирующего сигнала UРС, что приводит к увеличению или уменьшению длительности между импульсами.
В результате происходит изменение мощности вторичных цепей, благодаря чему обеспечивается стабилизация напряжения на выходе.
Для обеспечения безопасности необходима гальваническая развязка между питающей сетью и обратной связью. Как правило, для этой цели используются оптроны.
ШИМ на постоянник с обратной связью
Ну да забыл написать, нас же хлебом не корми дай что нибудь поделать.
Продолжаем.
Как я писал, для шима проще всего взять готовую платку ВМ4511 «Регулятор яркости ламп накаливания».
Можете ее спаять с нуля, но по моему проще купить..
Значит берем эту платку, подключаем ее к источнику питания 12-20 вольт, в качестве нагрузки припаиваем лампочку на 12-20 вольт.
Убеждаемся что регулятор работает!
Не стоит в данный момент подключать двигатель!
Предлагаю следующую последовательность внесения изменений в регулятор.
Поменять местами выводы компаратора 2 и 3. Дело в том что при подачи питания на платку, компаратор держит транзистор открытым и двигатель стартует на полном напряжении питания (а так нельзя включать постоянники). Проверяем что схема работает.
Далее рассчитываем резистор R9.
ПРЕДУПРЕЖДЕНИЕ!!!!!
Если вместо отличного (лучшего) советского стабилитрона вы возьмете аналог (например 1N или 2N — не помню). То учитывайте что у советского стабилизатора КС512А1 минимальный ток стабилизации 0.001 А, а у аналогов (1N то-ли 2N) минимальный ток стабилизации начинается с 0.02 А.
Поэтому узнавайте минимальный ток стабилизации и прибавляйте его к значению 0.009 (например (Uпит-12)/0,029.
У меня напряжение питания 60 Вольт, я поставил резистор 5 кОм.
Меняем резистор R9, впаиваем стабилитрон в платку.
Выносим (а то и меняем) транзитор на радиатор, ну и силовую часть.
Кстати у меня транзистор IRFP4468. Но не обязательно использовать столь дорогие транзисторы, а на этапе отладки лучше попроще и подешевле (я таки спалил один).
Ставим переменный резистор в положение минимального опорного напряжения (стрелкой вниз), меняем нагрузку на лампочку с вашим рабочим напряжением.
Проверяем что все работает.
Меняем резисторы делителя R1, R2, R3 и ставим стабилитрон Д814А.
Проверяем что все работает. Уже можно подключать ваш двигатель, при включении желательно повернуть резистор в минимальное опорное напряжение (стрелку вниз).
Собственно немного о замене резисторов делителя и стабилитроне.
Так как мы поменяли выводы 2 и 3 компаратора, то выдаваемая мощность растет с увеличением опорного напряжения.
Но если на компаратор подать напряжение больше 10 вольт, то транзистор останется в постоянно открыт состоянии и выгорит.
Поэтому стоит поставить защиту от подачи большого напряжения на вход компаратора.
Для этого и используется стабилитрон Д814А. А чтоб он работал на 12 вольтах, у нему нужен резистор минимум 3 кОм.
В последствии уменьшенное сопротивление делителя тоже пригодится.
Про 10 Вольт пишут в темах, сам я не мерил (нужен осциллограф дабы посмотреть амплитуду пилы).
Стабилитрон Д814А, ограничивает напряжение ниже чем может выдать делитель. Но в крайних положениях регулирующего резистора у меня остается большой запас изменения напряжения практически не влияющего на работу двигателя. В мин — двигатель просто не крутится, около МАКС — двигатель не набирает оборотов.
Все вы уже можете подключать двигатель и пробовать регулировать обороты.
Но помните на самым минимальных оборотах (ну не совсем мин, так оборотов 100), скорее всего вы сможете остановить двигатель двумя пальцами.
PS: Далее (скорее завтра или послезавтра) по шагам пройдемся в создании обратной связи. Настраивается она легко — как я писал нужен только китайский тестер.
PS2: Да я забыл сказать: у меня двигатель с последовательным возбуждением (а может и вообще на магнитах — пока не разбирал). Поэтому я не озадачен изменением напряжения на двух обмокках.Изменено 18.11.2012 13:30 пользователем Alex_IZA



