Управление электродвигателями
ШИМ применяется для управления двигателями в импульсном режиме. По характеристикам двигателя необходимо подобрать значение частоты ШИМ, чтобы обеспечить оптимальные характеристики электропривода. При выборе задающей частоты важным критерием являются акустические шумы, создаваемые двигателем при работе. Коллекторные двигатели могут создавать звуковой шум на частотах от 20 Гц до 4 кГц. Для исключения этого нежелательного эффекта нужно выбирать частоту выше 4 кГц. На таких частотах акустического шума уже не будет, так как механические части имеют более низкие резонансные частоты.
https://youtube.com/watch?v=SlyYhEGv8iE
https://youtube.com/watch?v=if8Ff6kPh5U
https://youtube.com/watch?v=MBs-TPnPQw0
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
амплитуда (U);
частота (f);
скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
Чем выше частота, тем выше точность регулирования.
Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются
Поэтому для построения ключей важно использование быстродействующих элементов.
При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
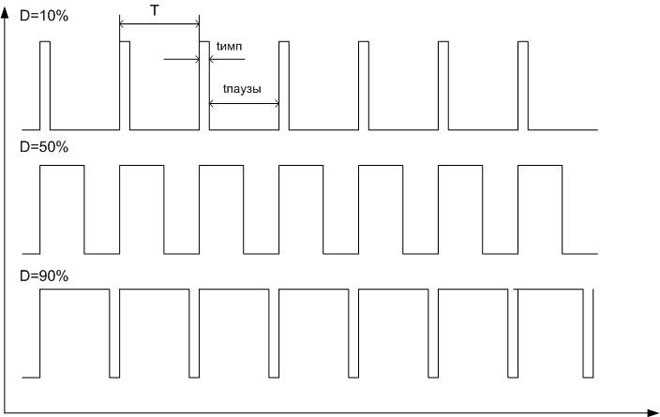
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f)
Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
Средние цены
Для того, чтобы понять в каком ценовом диапазоне находятся МРРТ контроллеры различных производителей, можно рассмотреть стоимость моделей, приведенных выше, это:
- КЭС 100/20 MPPT – от 10000,00 рублей;
- КЭС DOMINATOR MPPT 250/60 – от 40000,00 рублей;
- Epsolar MPPT TRACER-2215BN 20А 12/24В – от 9000,00 рублей;
- IT6415ND 60A 12V/24V/36 В – от 30000,00 рублей.
- Victron BlueSolar 100/15 12/24В 15А – от 11000,00 рублей;
- Victron BlueSolar 150/70 12/24/48В 70А – от 55000,00 рублей.
Как видно из приведенных цифр, наиболее дешевые, это модели китайского производства, а наиболее дорогие – европейских производителей.
Продукция отечественных предприятий несколько дороже устройств, произведенных в Китае, но дешевле изготовленных в Европе.
ОДНОТАКТНЫЕ ШИМ-КОНТРОЛЛЕРЫ ОБЩЕГО НАЗНАЧЕНИЯ
Данная группа является наиболее обширной среди всех ШИМ-контроллеров TI. В нее входят контроллеры, которые могут использоваться в изолированных и неизолированных топологиях импульсных преобразователей мощностью от 10 до 800 Вт, в которых используется один ключевой элемент. К числу поддерживаемых топологий относятся неизолированные повышающая и понижающая, изолированные прямоходовая и обратноходовая.
Рис. 2. Типичное применение UCC38083/4/5/6 в изолированном двухтактном преобразователе со средней точкой трансформатора
Большинство контроллеров данной группы поддерживают оба способа управления: по напряжению или току. Управление по напряжению является более простым и малошумящим способом управления, который отвечает широким требованиям по входному и выходному напряжению. Управление в токовом режиме отличается более высоким быстродействием и встроенной поддержкой ограничения тока.
Контроллеры также различаются степенью интеграции. Некоторые из них поддерживают возможность программируемого плавного старта, который делает прогнозируемым запуск преобразователя, и подавления импульсных скачков напряжения, вызванных включением МОП-транзистора.
В приложениях, где требуется незамедлительное реагирование на изменение входного напряжения, рекомендуется использовать контроллеры с управлением по напряжению и прямой связью по напряжению.
Некоторые контроллеры содержат мощные драйверы, что позволяет избавиться от необходимости применения внешних драйверов МОП-транзисторов.
Для приложений с питанием от сети переменного напряжения разработаны специальные контроллеры с пониженным уровнем пускового тока (все контроллеры, выполненные по технологии BiCMOS, и устройства с префиксом UCC). Эти же контроллеры характеризуются малым рабочим током, что улучшает кпд преобразования при малых уровнях нагружения.
Например, 8-выводные контроллеры семейства UCC3813, предназначенные для построения сетевых стабилизаторов и DC/DC-преобразователей с фиксированной частотой преобразования и управлением в токовом режиме, характеризуются типичным пусковым и рабочими токами 100 мкА и 500 мкА, соответственно.
На рис. 1 показан пример построения изолированного сетевого источника питания на основе еще одного 8-выводного BiCMOS ШИМ-контроллера UCC38C44, входящего в состав обширного семейства высококачественных ШИМ-контроллеров с управлением в токовом режиме UCC28C4x/UCC38C4x. Они различаются температурными диапазонами (соответственно, -40°C…105°C/ 0°C…70°C), максимальным заполнением импульсов (50% у C42,C43, C40 и 100% у С44, С45, С41), а также порогами блокировки/разблокировки защиты от снижения напряжения (9,0 В/14,5 В у С42, С44, 7,6 В/8,4 В у С43, С45, 6,6 В/7,0 В у С40, С41). Совместимость по расположению выводов со стандартными семействами UC384xA и UC384x делает возможным модернизацию существующих решений путем прямой замены на представителей семейств UCC28C4x/UCC38C4x, которые несут в себе преимущества повышенных до 1 МГц частот преобразования (снижение габаритов емкостных и индуктивных компонентов), улучшения КПД преобразования при малом нагружении и др.
Добиться еще меньших размеров преобразователя позволяют контроллеры с функцией плавного старта, которая позволяет существенно снизить требования к входному конденсатору. Данная функция поддерживается, например, семейством 8-выводных ШИМ-контроллеров UCC3800/1/2/3/4/5. Представители данного семейства, наравне с предыдущим, поддерживают цифровую фильтрацию на входе контроля тока (leading edge blanking), которая заключается в блокировке токового сигнала на заданное время (100 нс) после нарастающего фронта ШИМ-сигнала. Такая цифровая фильтрация позволяет исключить RC-компоненты цепи аналоговой фильтрации на входе контроля тока (CS).
Принцип импульсного регулирования
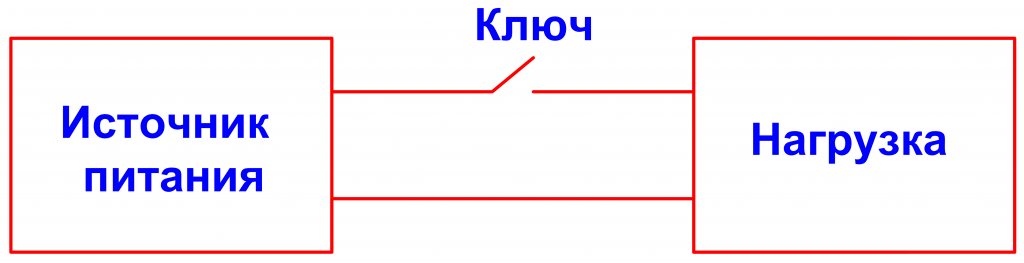
Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет следующий вид. Источника постоянного напряжения Uип ключом K подсоединяется к нагрузке Н. Ключ К переключается с определенной частотой и остается во включенном состоянии определенную длительность времени. С целью упрощения схемы я на ней не изображаю другие обязательные элементы. В данном контексте нас интересует только работа ключа К.
Чтобы понять принцип ШИМ воспользуемся следующим графиком. Разобьем ось времени на равные промежутки, называемые периодом T. Теперь, например половину периода мы будем замыкать ключ K. Когда ключ замкнут, к нагрузке Н подается напряжение от источника питания Uип. Вторую часть полупериода ключа находится в закрытом состоянии. А потребитель останется без питания.
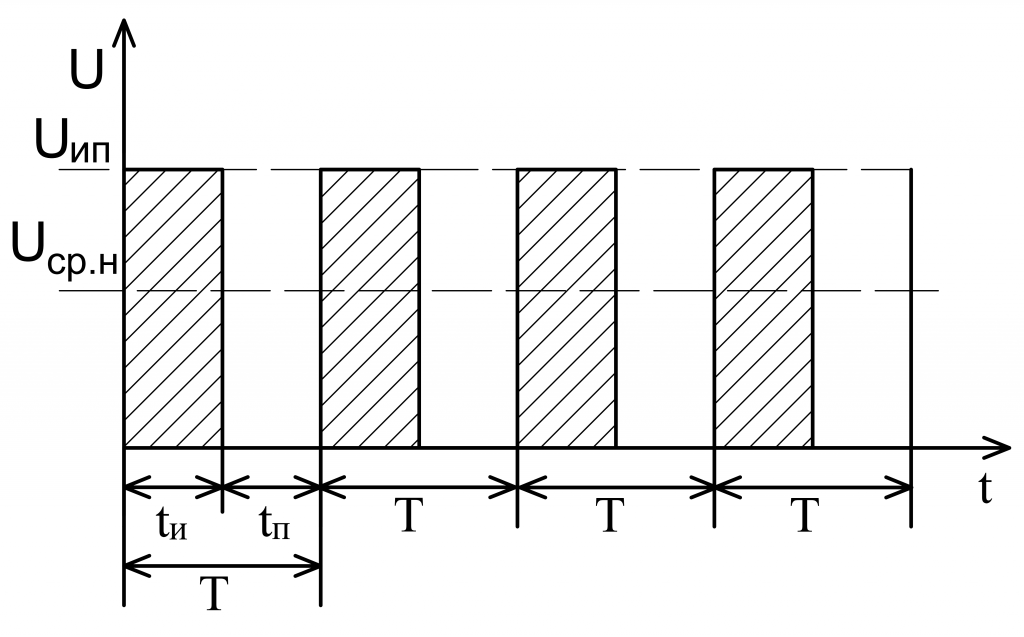
Время, в течение которого ключ замкнут, называется временем импульса tи. А время длительности разомкнутого ключа называют временем паузы tп. Если измерить напряжение на нагрузке, то оно будет равно половине Uип.
Среднее значение напряжения на нагрузке можно выразить следующей зависимостью:
Uср.н = Uип tи/T.
Отношение времени импульса tи к периоду T называют коэффициентом заполнения D
А величина, обратная ему называется скважностью:. S = 1/D = T/tи. S = 1/D = T/tи
S = 1/D = T/tи.
На практике удобнее пользоваться коэффициентом заполнения, который зачастую выражают в процентах. Когда транзистор полностью открыт на протяжении всего времени, то коэффициент заполнения D равен единице или 100 %.
Если D = 50 %, то это означает, что половину времени за период транзистор находится в открытом состоянии, а половину в закрытом. В таком случае форма сигнала называется меандр.Следовательно, изменяя коэффициент D от 0 до единицы или до 100 % можно изменять величину Uср.н от 0 до Uип:
Uср.н = Uип∙D.
А соответственно регулировать и величину подводимой мощности:
Pср.н = Pип∙D.
Диммер как разновидность ШИМ
Аналогично работает ШИМ и для нагрузки при переменном напряжении. Например, в диммерах. В них используется регулятор (на изображении ниже это VR), которым устанавливается так называемое опорное напряжение. С ним сравнивается напряжение, которое включает симистор. В зависимости от величины опорного напряжения отсекается часть полуволны напряжения, получаемого от сети 220 В. Свет лампы в результате управляется от нуля до максимума.
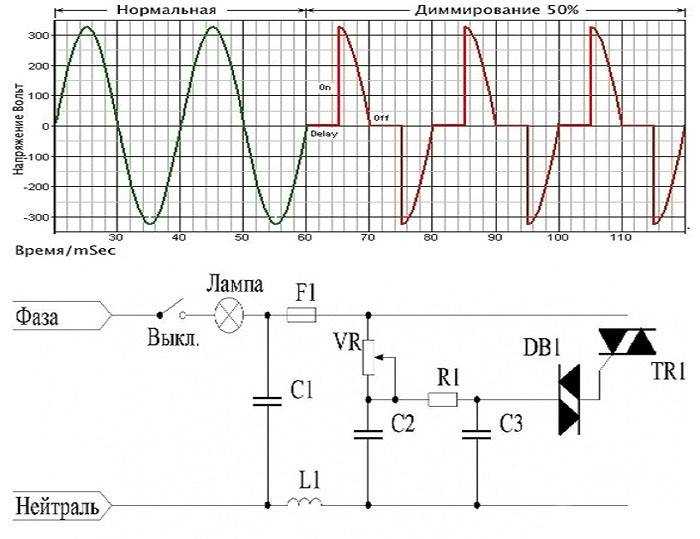
Принцип работы и схема диммера
На примере диммера понятно, что пауза перед включением тиристора является следствием относительно равномерного увеличения амплитуды синусоиды сетевого напряжения. Более сложные аналоговые и цифровые ШИМ работают со встроенным генератором пилообразного напряжения определенной частоты. Именно он определяет нарастание напряжения, с которым сравнивается управляемое ШИМ выходное напряжение.
Схема ШИМ с обозначением генератора пилообразного напряжения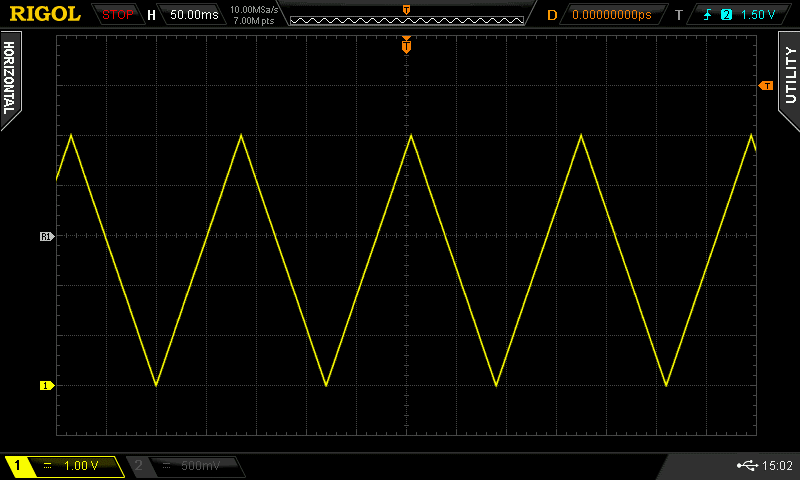
Пилообразное напряжение от генератора на экране осциллографа
Аналоговые схемы ШИМ работают почти как диммеры. Разница лишь в том, что для формирования управляющих импульсов на основе пилообразного напряжения используется специальный операционный усилитель – компаратор. В цифровых ШИМ принцип работы совершенно другой. В них управляемое напряжение сначала преобразуется определенным образом, а затем ставится в зависимость от контролируемых импульсов, которые подсчитываются.
Примером такого ШИМ могут быть устройства с популярным микроконтроллером ARDUINO. Со временем аналогичных устройств становится все больше. Они заменяют громоздкие и тяжелые трансформаторы со стальными сердечниками. Это улучшает экономичность и материалоемкость электрооборудования. А также идет на пользу окружающей среде – уменьшается ее загрязнение. Так что ШИМ, бесспорно, является одним из выдающихся технических решений, успех которого неразрывно связан с достижениями научно-технической революции.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Читать также: Мини снегоходы самоделки своими руками видео бесплатно
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
В большинстве современных электронных устройств практически не используются аналоговые (трансформаторные) блоки питания, им на смену пришли импульсные преобразователи напряжения. Чтобы понять, почему так произошло, необходимо рассмотреть конструктивные особенности, а также сильные и слабы стороны этих устройств. Мы также расскажем о назначении основных компонентов импульсных источников, приведем простой пример реализации, который может быть собран своими руками.
История
Некоторым машинам (например, двигателю швейной машины ) требуется частичная или регулируемая мощность. В прошлом управление (например, ножной педалью швейной машины) реализовывалось с помощью реостата, подключенного последовательно с двигателем, чтобы регулировать количество тока, протекающего через двигатель. Это была неэффективная схема, так как это также тратило впустую мощность в виде тепла в резистивном элементе реостата, но терпимо, потому что общая мощность была низкой. Хотя реостат был одним из нескольких методов управления мощностью (см. Автотрансформаторы и Variac для получения дополнительной информации), дешевый и эффективный метод переключения / регулировки мощности еще не был найден. Этот механизм также должен был иметь возможность приводить в действие двигатели для вентиляторов, насосов и роботизированных сервоприводов и должен был быть достаточно компактным, чтобы взаимодействовать с регуляторами яркости ламп. ШИМ возник как решение этой сложной проблемы.
Одно из первых применений ШИМ было в Sinclair X10, аудиоусилителе мощностью 10 Вт, доступном в виде комплекта в 1960-х годах. Примерно в то же время ШИМ начал использоваться в управлении двигателями переменного тока.
Следует отметить, что в течение примерно столетия некоторые электродвигатели с регулируемой скоростью имели приличный КПД, но они были несколько более сложными, чем электродвигатели с постоянной скоростью, и иногда требовали громоздких внешних электрических устройств, таких как группа резисторов с регулируемой мощностью или вращающиеся преобразователи. например, диск Уорда Леонарда .
Контакты ШИМ в микроконтроллере AVR ATmega16
Микроконтроллер Atmega16 имеет 4 контакта для использования ШИМ модуляции — PB3(OC0), PD4(OC1B), PD5(OC1A), PD7(OC2). Более наглядно они представлены на следующем рисунке.
Также ATmega16 имеет два 8-битных (Timer0 и Timer2) и один 16-битный таймер (Timer1). Для понимания принципов формирования ШИМ мы должны понимать основы работы с этими таймерами. Как известно, частота представляет собой количество циклов в секунду поэтому она однозначно связано зависимостью с временем. То есть чем более высокая частота нам нужна, тем более быстрый таймер мы должны использовать. Чем выше частота ШИМ, тем более точно мы можем управлять ее параметрами.
В данной статье для управления ШИМ в микроконтроллере ATmega16 мы будем использовать его Timer2. С его помощью можно выбрать коэффициент заполнения (duty cycle) ШИМ в широких пределах. Кратко рассмотрим основы этого процесса.
https://youtube.com/watch?v=2fCUH9DSB00
https://youtube.com/watch?v=MgegmGK3wKI
https://youtube.com/watch?v=igS7mn50x2Q
Если шим — контролёр выходит из строя
Временами шим — контролёры их схемы и источник питания (в том числе и встроенные в ноутбук) могут ломаться и выходить из строя. В таких случаях понадобится выявить неисправности (в одних случаях проверять необходимо источник питания, в других проверять стоит саму схему). Для этой цели были разработаны мультиметры. Мультиметры тщательно исследуют работоспособность шим — контролёров и при необходимости помогают устранить неисправности. Самыми распространёнными причинами, почему следует проверять эти устройства, считают нестабильную работу платы и изменения показателей напряжения. Если их устранить, техника будет работать.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
https://youtube.com/watch?v=6OPdstU6MP4
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки
Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Принцип работы ШИМ
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:. Скважность ШИМ
Скважность ШИМ
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
T(перод) = 1/f(частота)
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
Arduino и ШИМ
В уроке про функции времени я рассказывал, что у микроконтроллера есть так называемые счётчики, которые считают “пинки” от тактового генератора (кварца). Данные счётчики как раз и генерируют ШИМ сигнал, т.е. само вычислительное ядро микроконтроллера в этом не участвует. Помимо расчётов, даже вывод сигнала с ноги МК ложится на плечи счётчика
Это очень важно понимать, потому что ШИМ сигнал не тормозит выполнение кода, так как его генерацией занимается буквально “другая железка”
На платах UNO/Nano/Pro Mini у нас есть три таймера-счётчика, у каждого таймера есть по два выхода на пины МК, то есть у нас есть 2*3=6 пинов, способных генерировать ШИМ сигнал. Для генерации ШИМ у нас есть готовая функция analogWrite(pin, duty)
- pin – пин, являющийся выводом таймера. Для Нано/Уно это пины D3, D5, D6, D9, D10, D11. На некоторых платах они помечены * звёздочкой
- duty – заполнение ШИМ сигнала. По умолчанию все “выходы” ШИМ у нас 8-битные, то есть duty может принимать значение с “разрешением” 8 бит, а это 0-255
Совместим эти знания с прошлым уроком и попробуем менять яркость светодиода, подключенного через резистор к пину D3. Потенциометр подключен к пину A0
void setup() { pinMode(3, OUTPUT); // D3 как выход } void loop() { // ШИМ на 3 пин, 1023/4 = 255 — перевели диапазон analogWrite(3, analogRead(0) / 4); delay(10); }
Рассмотренный пример меняет яркость светодиода в зависимости от положения рукоятки потенциометра.
Пару слов о “стандартном” ШИМ сигнале – мы получаем его с такими настройками, какие нам даёт библиотека Arduino.h, а настройки эти сильно занижены по сравнению с возможностями Arduino. Про “улучшение” ШИМ мы поговорим позже, а сейчас давайте глянем на характеристики ШИМ “из коробки”:
| Таймер | Пины | Частота | Разрешение |
| Timer 0 | D5 и D6 | 976 Гц | 8 бит (0-255) |
| Timer 1 | D9 и D10 | 488 Гц | 8 бит (0-255) |
| Timer 2 | D3 и D11 | 488 Гц | 8 бит (0-255) |
Это весьма плачевные цифры, особенно по частоте. Все таймеры приведены под одну гребёнку, чтобы пользователь не думал не гадал и лишнюю документацию не изучал. К изменению частоты и разрядности ШИМ мы вернёмся в отдельном уроке, а пока что можете посмотреть данный урок в видео варианте.
Расшифровка и определение ШИМ
Модуляция ширины импульса означает, что ширина импульса возникает строго в прямоугольной волне.
Это улучшает управление двигателем. Вместо чистого сигнала постоянного тока к двигателю используется серия импульсов. Они могут находиться на максимальном напряжении, но только на долю секунды. Выполнение повторных действий приведет к тому, что двигатель начнет вращаться. Это позволит более комфортно управлять скоростью. Простое применение сигнала постоянного тока не приведет к преодолению трения двигателя и передач, наоборот, запуск будет обрывистый с низкой скоростью.

Увеличивая частоту импульсов ШИМа на Ардуино, можно выполнять операции на высокой скорости.
Декодер создает этот сигнал для управления двигателем. Это та же концепция, что и функции мощности импульса, находящиеся на блоках питания постоянного тока.
Рассмотрим основные преимущества использования ШИМ Ардуино:
- Эффективность электропитания: индукция обмоток ротора будет усреднять ток (индукторы сопротивляются изменению тока). Транзисторы имеют низкий импеданс при низком падении напряжения и рассеивании мощности. Резистор рассеивает большую мощность (I2R) в виде тепла.
- Управление скоростью: двигатель будет видеть источник с низким импедансом, даже если он постоянно переключается между высоким и низким напряжением. Результат очевиден – двигатель ускоряется. Серийное сопротивление приведет к тому, что двигатель будет испытывать малое напряжение, поэтому легко остановится в нужный момент.
- Цепь управления: для цифровой электроники (например, микроконтроллера ) очень легко включать или выключать напряжение с помощью транзисторов. Аналоговый выход (с электронным или механическим управлением) требует большего количества компонентов и увеличивает рассеивание мощности. Это будет более дорогостоящим вариантом, с точки зрения электроники и требований к электропитанию.
Создать широтно-импульсный модулятор можно на esp8266 шим, на Ардуино УНО и Ардуино Нано шим. То есть для конструирования подойдет любая модель описываемого микроконтроллера.
Обратноходовой импульсный источник питания
Это одна из разновидностей импульсных источников питания, имеющих гальваническую развязку как первичных, так и вторичных цепей. Сразу был изобретён именно этот вид преобразователей, который был запатентован ещё в далёком 1851 году, а его усовершенствованный вариант применялся в системах зажигания и в строчной развертке телевизоров и мониторов, для подачи высоковольтной энергии на вторичный анод кинескопа.
Основная часть этого блока питания тоже трансформатор или может быть дроссель. В его работе есть два этапа:
- Накопление электрической энергии от сети или от другого источника;
- Вывод накопленной энергии на вторичные цепи полумоста.
Во время размыкания и замыкания первичной цепи во вторичной появляется ток. Роль размыкающего ключа выполнял чаще всего транзистор. Узнать параметры которого нужно обязательно использовать справочник. управление же этим транзистором чаще всего полевым выполняется за счёт ШИМ-контроллера.
Управление ШИМ-контроллером
Преобразование сетевого напряжения, которое уже прошло этап выпрямления, в импульсы прямоугольной формы выполняется с какой-то периодичностью. Период выключения и включения этого транзистора выполняется с помощью микросхем. ШИМ-контроллеры этих ключей являются основным активным управляющим элементом схемы. В данном случае как прямоходовой, так и обратноходовой источник питания имеет трансформатор, после которого происходит повторное выпрямление.
Для того чтобы с увеличением нагрузки не падало выходное напряжение в ИИП была разработана обратная связь которая была заведена непосредственно в ШИМ-контроллеры
Такое подключение даёт возможность полной стабилизации управляемым выходным напряжения путём изменения скважности импульсов. Контроллеры, работающие на ШИМ модуляции, дают большой диапазон изменения выходного напряжения
Микросхемы для импульсных источников питания могут быть отечественного или зарубежного производства. Например, NCP 1252 – ШИМ-контроллеры, которые имеют управление по току, и предназначены для создания обоих видов импульсных преобразователей. Задающие генераторы импульсных сигналов этой марки показали себя как надёжные устройства. Контроллеры NCP 1252 обладают всеми качественными характеристиками для создания экономически выгодных и надежных блоков питания. Импульсные источники питания на базе этой микросхемы применяются во многих марках компьютеров, телевизоров, усилителей, стереосистем и т. д. Заглянув в справочник можно найти всю нужную и подробную информацию обо всех её рабочих параметрах.
Принцип работы ШИМ
Сигнал, промодулированный по ширине импульса, формируется двумя способами:
- аналоговым;
- цифровым.
При аналоговом способе создания ШИМ-сигнала несущая в виде пилообразного или треугольного сигнала подается на инвертирующий вход компаратора, а информационный – на неинвертирующий. Если мгновенный уровень несущей выше модулирующего сигнала, то на выходе компаратора ноль, если ниже – единица. На выходе получается дискретный сигнал с частотой, соответствующей частоте несущего треугольника или пилы, и длиной импульса, пропорциональной уровню модулирующего напряжения.
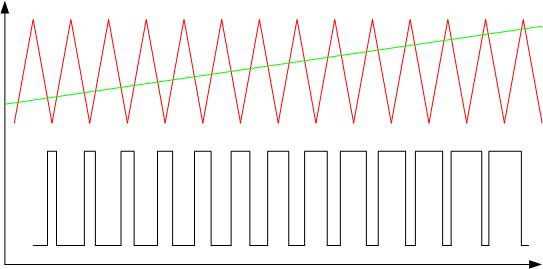
В качестве примера приведена модуляция по ширине импульса треугольного сигнала линейно-возрастающим. Длительность выходных импульсов пропорциональна уровню выходного сигнала.
Аналоговые ШИМ-контроллеры выпускаются и в виде готовых микросхем, внутри которых установлен компаратор и схема генерации несущей. Имеются входы для подключения внешних частотозадающих элементов и подачи информационного сигнала. С выхода снимается сигнал, управляющий мощными внешними ключами. Также имеются входы для обратной связи – они нужны для поддержания установленных параметров регулирования. Такова, например, микросхема TL494. Для случаев, когда мощность потребителя относительно невелика, выпускаются ШИМ-контроллеры со встроенными ключами. На ток до 3 ампер рассчитан внутренний ключ микросхемы LM2596.
Цифровой способ осуществляется применением специализированных микросхем или микропроцессоров. Длина импульса регулируется внутренней программой. Во многих микроконтроллерах, включая популярные PIC и AVR, «на борту» имеется встроенный модуль для аппаратной реализации ШИМ, для получения PWM-сигнала надо активировать модуль и задать параметры его работы. Если такой модуль отсутствует, то ШИМ можно организовать чисто программным методом, это несложно. Этот способ дает более широкие возможности и предоставляет больше свободы за счёт гибкого использования выходов, но задействует большее количество ресурсов контроллера.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор – исток» и «затвор – сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Примеры использования ШИМ на Ардуино
Широкополосная широтно-импульсная модуляция является способом кодирования напряжения на фиксированную несущую частоту. Он обычно используется для радиоуправляемых устройств. Каждый тип схемы модуляции имеет свои преимущества и недостатки.
AM-модуляция была первым типом модуляции, используемой для радиопередач. Самая простая схема модуляции для реализации требует только одного транзистора или усилителя вакуумной трубки, как это было сделано в первые дни с момента создания радио.
С необходимостью цифровой связи был изобретен новый метод модуляции – ШИМ. Этот метод обладает той же помехоустойчивостью, что и радиоволны. Самая большая разница – простота и цифровая природа модуляции. Вместо того, чтобы изменять частоту модуляции с напряжением, выход просто включается и выключается с фиксированной частотой. Процент времени включения пропорционален сигнальному напряжению.





