Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2, где s – скольжение асинхронного электродвигателя, n1 – частота вращения магнитного поля статора, об/мин, n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Пуск с помощью пускового реостата или пусковых сопротивлений
Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
| (2) |
а в начальный момент пуска, при n = 0,
| (3) |
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн [в малых машинах до (2,0 – 2,5) Iн].
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
| Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя |
При пуске на холостом ходу Mст = M. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн.
Mдин = M – Mст ,
под воздействием которого происходит увеличение n.
Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми.
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:
Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Использование H моста на практике
Сначала про блок питания, не знаем почему, но у новичкам он доставляет массу проблем. Но правило простое — мы можем запитать схему одним или двумя напряжениями.
Если мы выберем первый вариант, и логическая часть, и двигатели будут питаться от одного источника, то мы настоятельно не рекомендуем вам выбирать эту конфигурацию. Особенно, если вы хотите питать свои двигатели от 5 В, доступных на плате Arduino. Это возможно, но требует достаточно эффективного источника питания и хорошей фильтрации.
| Питание двигателей и Arduino от одного источника питания может привести к зависанию программы и частым перезагрузкам. |
Однако лучше всего разделить эти два источника питания, например двигатели, прямо от батареи, микроконтроллер через стабилизатор и соответствующие конденсаторы.
Поэтому однозначно безопаснее выбрать второе решение, в котором Arduino будет запитываться от отдельного источника. В нашем случае мы будем использовать источник питания от USB и батарею на 9 В, от которой мы будем питать наши моторы напрямую (Arduino также может питаться от него, но через встроенный стабилизатор , поэтому нам не нужно беспокоиться о помехах).
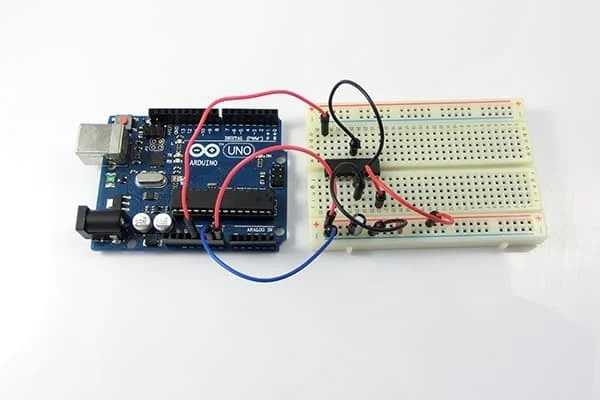
Схема должна выглядеть так, как показано ниже, обратите внимание, что у нас 9В, а не 5В! Помните об этом, чтобы ничего не повредить!
| В том месте, где выведены оранжевые провода, подключаем мотор. Однако, пожалуйста, прочтите остальную часть статьи, прежде чем что-либо подключать! |
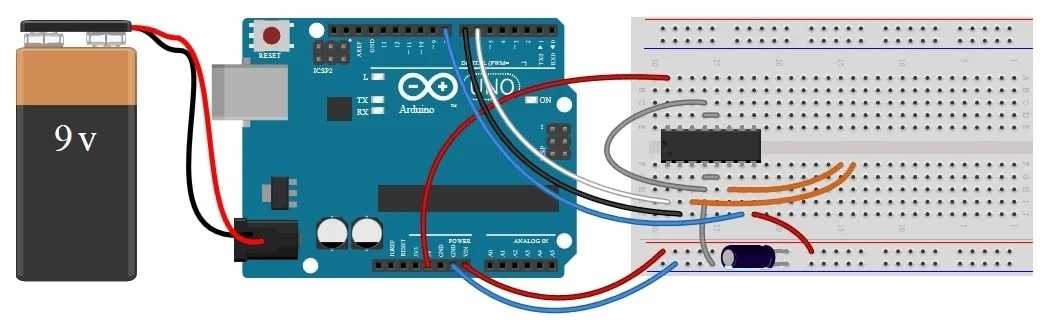
Схема подключения
| Обязательно помните о конденсаторах на макетной плате. Они фильтруют напряжение, поступающее непосредственно от аккумулятора. |
Макет сборки относительно сложный. Для начала стоит подключить земли моста L293D. Сделать это можно с помощью отрезанных от резисторов ножек. Это сэкономит место:
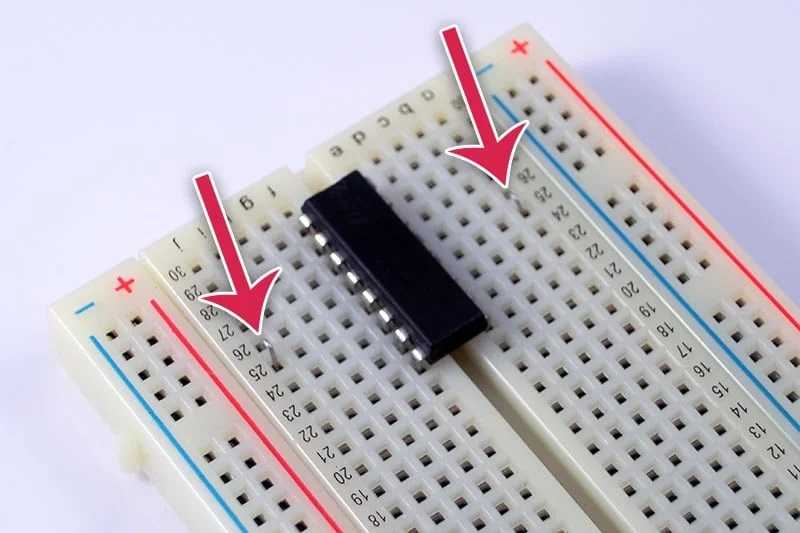
Соединение массы моста
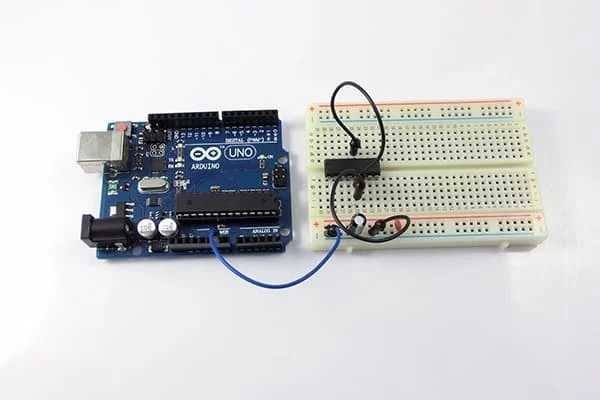
Затем по очереди:
 |
 |
| Заземление | Подключение 9В (питание моторов) |
 |
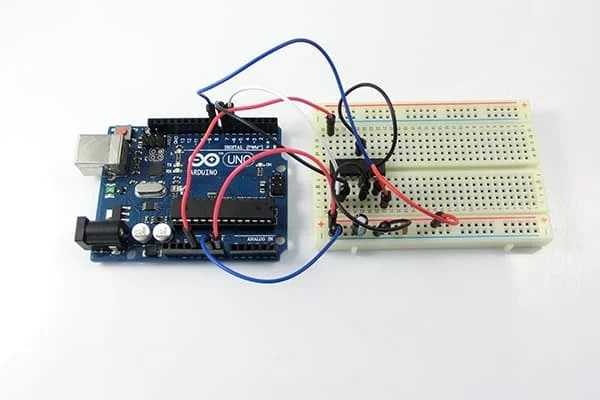 |
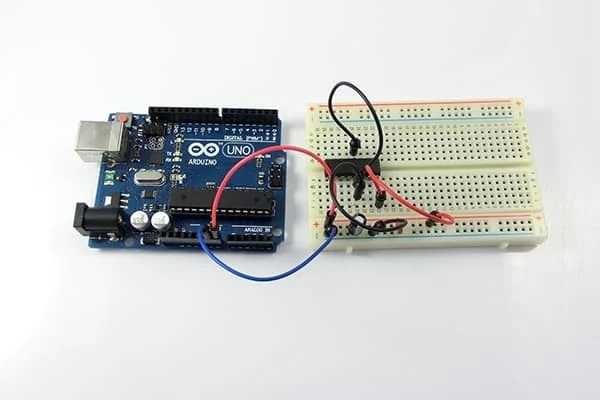
| Подключение 5 В (питание логики) | Подключение управляющих сигналов |
Теперь пора подключить мотор (в начале один). Как мы уже упоминали в начале, мы будем моделировать двигатели, чтобы не покупать их без надобности. Как мы это делаем? Очень просто.
Однофазные асинхронные электродвигатели
Устройство и принцип действия
Мощность такого однофазного двигателя 220В может в зависимости от конструкции находиться в пределах от 5 Вт до 10 кВт. Его ротор – это обычно короткозамкнутая обмотка («беличья клетка») – медные или алюминиевые стержни, замкнутые с торцов.
Такой однофазный двигатель, как правило, имеет две смещенные на 90° друг относительно друга обмотки. Рабочая (главная) при этом занимает большую часть пазов статора, а пусковая (вспомогательная) – оставшуюся. И однофазным его называют потому, что у него лишь одна рабочая обмотка.
Переменный ток, протекающий по главной обмотке, создает периодически меняющееся магнитное поле. Его можно считать состоящим из двух круговых с одинаковой амплитудой, вращающихся навстречу друг другу.
По закону электромагнитной индукции в замкнутых витках ротора меняющийся магнитный поток создает индукционный ток, взаимодействующий с порождающим его полем. Если ротор неподвижен, моменты действующих на него сил одинаковы, вследствие чего ротор остается неподвижным.
Если же ротор начать вращать, то равенство моментов этих сил нарушится, поскольку скольжение его витков относительно вращающихся магнитных полей станет разным. Как следствие – сила Ампера, действующая на витки ротора со стороны прямого магнитного поля, будет значительно больше, чем со стороны обратного.
Индукционный ток в витках ротора может возникать лишь при пересечении ими силовых линий магнитного поля. А для этого они должны вращаться со скоростью, чуть меньшей, чем частота вращения поля (при одной паре полюсов – 3000 об/мин). Отсюда и название, которое получили такие электродвигатели, асинхронные.
При увеличении механической нагрузки скорость вращения уменьшается, возрастает величина индукционного тока в витках ротора. Как следствие – возрастают и механическая мощность двигателя, и мощность потребляемого им переменного тока.
Схема запуска и подключения
Понятно, что раскручивать вручную ротор при каждом запуске электродвигателя неудобно. Для создания первоначального пускового момента и используется пусковая обмотка. Поскольку она составляет с рабочей обмоткой прямой угол, для создания вращающегося магнитного поля ток в ней должен быть сдвинут по фазе относительно тока в рабочей обмотке тоже на 90°.
Добиться этого можно включением в цепь ее питания фазосмещающего элемента. Резистор или дроссель обеспечить фазовый сдвиг в 90° не могут, поэтому в большинстве ситуаций логично использование конденсатора в качестве фазосмещающего элемента. В этом случае однофазный электродвигатель обладает наилучшими пусковыми свойствами.
Когда фазовращающий элемент является конденсатором, однофазные электродвигатели конструктивно могут быть такими:
- с пусковым конденсатором (рис. а);
- с пусковым и рабочим (рис. б);
- только с рабочим конденсатором (рис. в).
Первый (наиболее распространенный) вариант предусматривает подключение пусковой обмотки с конденсатором ненадолго на время пуска, после чего они отключаются. Реализовать его можно с помощью реле времени, а то и просто за счет замыкания цепи во время нажатия пусковой кнопки. Эта схема запуска характеризуется сравнительно небольшим пусковым током, но в номинальном режиме характеристики невысоки. Причина в том, что поле статора является эллиптическим (в направлении полюсов оно сильнее, чем в перпендикулярном).
Схема с рабочим, постоянно включенным конденсатором лучше работает в номинальном режиме, но имеет посредственные пусковые характеристики. Вариант с пусковым и рабочим конденсатором является промежуточным между двумя описанными выше. Расчет значений их емкостей сравнительно прост: у рабочего 0,75 мкФ на 1 кВт мощности, у пускового – в 2,5 раза больше.
https://youtube.com/watch?v=_aqFBtnpI1M
Управление двигателем постоянного тока
Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.
Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.
- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.
Схемы управления двигателем на базе интегральной микросхемы LM317
Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.
Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.
- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.
https://youtube.com/watch?v=uPdv7l9zx2c
Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная. Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Реверс двигателя постоянного тока схемы.
В статье «Регуляторы оборотов электродвигателей » речь шла о регулировке оборотов коллекторных двигателей электроинструментов. Нередко возникает и другая задача: реверс двигателя постоянного тока, т.е. требуется обеспечить его вращение в одну и другую стороны. Это может понадобиться, например, для привода ворот в гараже или коттедже, в различных моделях и пр. Проще всего такая задача с реверсом решается с помощью мостовой схемы, которая в общем виде представлена на рис.1 . Схема реверса состоит из четырех ключей, двигателя и источника питания. Когда все ключи разомкнуты ( рис.1а ), ток через двигатель не течет. При коммутации первого и четвертого ключа ток через двигатель Iд течет слева направо ( рис.1б ), и двигатель вращается в одном направлении. А при коммутации второго и третьего ключей — течет справа налево ( рис.1в ), и двигатель вращается в обратном направлении. Понятно, что руками коммутировать для реверса четыре переключателя неудобно, поэтому вместо ключей используем транзисторы ( рис.2 ). Транзисторы могут быть разной проводимости, полевыми или биполярными. Работают они в ключевом режиме. Обратно включенные диоды VD1. VD4 защищают транзисторы от выхода из строя, так как в момент выключения электродвигателя возникает достаточно большая ЭДС самоиндукции. Силовая часть устройства реверса на биполярных транзисторах приведена на рис.3 . Она состоит из четырех силовых и двух управляющих транзисторов; резисторов, ограничивающих базовые токи; шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание моста происходит от блока питания, подающего постоянное напряжение +50 В относительно земли. В cостоянии покоя на оба канала (А и Б) подается 0 В. Все транзисторы закрыты, на концах обмоток потенциал 0 В. Вал двигателя не вращается. Для вращения двигателя в одну сторону на канал А подается постоянное напряжение +5 В или ШИМ-сигнал, на канал Б — 0 В. Открывается оптрон VU1, следом управляющий VТ5; при этом VТ6 закрыт. Через резистор R2 протекает ток, открывающий силовые VТ1 и VТ4, а VТ2 и VТЗ закрыты. Таким образом, на конце обмотки Я1 потенциал составляет +50 В, на конце обмотки Я2 — 0 В. Вал двигателя вращается (например, по часовой стрелке). Чтобы включить реверс двигателя, на канал Б подается напряжение +5 В (ШИМ-сигнал), на канал А — 0 В. Управляющий VТ6 открыт, VТ5 — закрыт. Через резистор R4 в цепи коллектора VТ6 протекает ток, открывающий VТ2 и VТ3, а VТ1 и VТ4 закрыты. На конце обмотки Я1 потенциал составляет 0 В, на конце обмотки Я2 — +50 В. Вал двигателя вращается против часовой стрелки. В случае подачи полoжительного напряжения на оба канала (А и Б) произойдет короткое замыкание, поэтому такой режим предотвращается управляющей частью устройства. Реверс двигателя постоянного тока можно выполнить и на МОП-транзисторах ( рис.4 ). На входе схемы реверса последовательно установлены два инвертора так, что выход одного одновременно является входом другого. При этом сигнал управления (высокий или низкий логический уровень) на входе DD1.1 инвертируется и подается на вход DD1.2. Выходы инверторов управляют полевыми транзисторами. При высоком уровне на входе, на выходе DD1.1 — низкий уровень, а на выходе DD1.2. — высокий. Благодаря этому VТ2 и VТЗ открыты и пропускают ток от отрицательного к положительному полюсу источника питания. Двигатель М1 вращается против часовой стрелки. Если на вход схемы реверса подать низкий уровень, на выходе DD1.1 появится высокий уровень и откроются VT1 и VТ4, замыкая другую диагональ моста. Теперь ток потечет в другую сторону, и двигатель изменит направление вращения. Для управления устройством для реверса необходим логический сигнал МОП-уровня (0/+12 В).
Устройство для реверса испытывалось с электродвигателем автомобильного вентилятора. Мощные МОП-транзисторы (для КП74ЗБ напряжение сток-затвор составляет 80 В. максимальный ток стока — 4,9 А) обеспечивают запас по мощности и по напряжению. Сопротивление открытого канала составляет 0,3.. .0,5 Ом. Для повышения эффективности VT1. . .VТ4 устанавливаются на теплоотводы. Напряжение питания зависит от типа применяемого электродвигателя М1. Если его напряжение питания превышает 15 В, следует предусмотреть в схеме дополнительный стабилизатор для питания микросхемы DD1. Вместо К561ЛА7 можно применить другую микросхему серии 561, если ее элементы обеспечивают инвертирование сигнала (К561ЛЕ5, К561ЛН2). Другая схема управления реверсом, построенная на мощных комплементарных полевых транзисторах, показана на рис.5 .
Законы, позволяющие использовать асинхронный электродвигатель как генератор
В генераторе напряжение, обычно подаваемое с аккумулятора, возбуждает в обмотке якоря магнитное поле, вращение же обеспечивается любым физическим устройством. В электродвигателе возможность подачи напряжения на обмотку якоря не предусмотрена. Чтобы он не поглощал, а вырабатывал электроэнергию, магнитное поле необходимо создать искусственно.
В асинхронном двигателе вращающееся магнитное поле ротора «отстает» от поля статора, обеспечивая процесс перехода электроэнергии в механическую энергию. Следовательно, чтобы запустить обратный процесс, нужно сделать так, чтобы поле статора вращалось медленнее поля ротора, либо чтобы оно вращалось в противоположную сторону.
Определение мощности по потребляемому току
Мощность двигателя можно определить по потребляемому им току. Для измерения силы тока будем использовать токоизмерительные клещи. Перед началом измерений предварительно отключаем подачу напряжения на электродвигатель. После этого снимаем крышку с клеммной коробки и расправляем токопроводящие жилы, чтобы обеспечить удобный доступ к ним. Затем подаем напряжение на двигатель и даем поработать в режиме номинальной нагрузки в течение нескольких минут. Устанавливаем предел измерений на значение «200 А» и токовыми клещами выполняем измерение потребляемого тока на одной из фаз. Далее замеряем напряжение на обмотках с помощью щупов, входящих в комплект токоизмерительных клещей. Колесо выбора режимов и пределов измерений устанавливаем в позицию для измерения переменного напряжения с пределом в 750 В. Щуп красного цвета присоединяем к гнезду для измерения напряжения, сопротивления и силы тока до десяти Ампер, а черного – к гнезду «COM». Замеры выполняем между клеммами «U1-V1» или «V1-W1» или «U1-W1». Расчет мощности электродвигателя выполняем по формуле: S=1.73×I×U, где S – полная мощность (кВА), I – сила тока (А), U – значение линейного напряжения (кВ)
Замеряем ток на одной из фаз, а также напряжение и подставляем полученные значения в формулу (например, при замере мы получили ток равный 15,2А, а напряжение – 220В): S=1.73×15.2×0.22=5.78 кВА Важно отметить, что мощность эл. двигателя не зависит от схемы соединения обмоток статора
В этом можно убедиться, выполнив измерения на этом же двигателе, но с обмотками статора, соединенными по схеме «звезда»: измеренный ток будет равен 8,8А, напряжение – 380В. Также подставляем значения в формулу: S=1.73×8,8×0.38=5.78 кВА По этой формуле мы определили мощность электродвигателя, потребляемую из электрической сети. Чтобы узнать мощность двигателя на валу, нужно полученное значение умножить на коэффициент мощности двигателя и на коэффициент его полезного действия. Таким образом, формула мощности двигателя выглядит так: P=S×сosφ×(η÷100), где P – мощность двигателя на валу; S – полная мощность двигателя; сosφ – коэффициент мощности асинхронного электродвигателя; η – КПД двигателя. Поскольку мы не располагаем точными данными, подставим в формулу средние значения cosφ и КПД двигателя: P=5,78×0,8×0,85=3,93≈4кВт Таким образом, мы определили мощность электродвигателя, которая равна 4 кВт. Мы рассказали о самых надежных методах определения мощности электродвигателя. Вы также можете посмотреть наше видео, в котором подробно показано, как определить мощность электродвигателя.
Источник
Насколько эффективно использование электродвигателя в качестве генератора
У использования электродвигателя как генератора есть свои «плюсы»:
- Агрегат достаточно прост в обслуживании и экономичен, поскольку конденсатор получает энергию от остаточного поля ротора и от вырабатываемого тока.
- Практически отсутствуют «побочные» траты энергии на магнитные поля или бесполезный нагрев.
И «минусы»:
- Преобразованный в генератор двигатель чувствителен к перепадам нагрузки.
- Частота вырабатываемого тока часто нестабильна.
- Такой генератор не может обеспечить промышленную частоту тока.
Если в вашем случае преимущества перевешивают недостатки, то применение асинхронного генератора целесообразно.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.






