Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
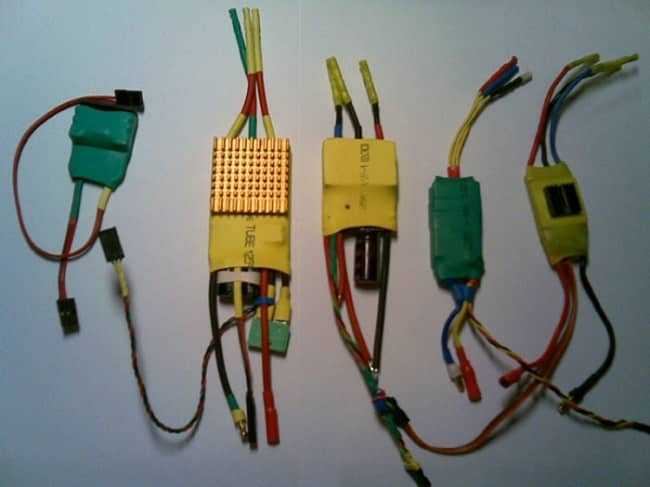
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд. Максимальная величина штатного напряжения для продолжительной работы. Сопротивление внутренних цепей контроллера. Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне)
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество
Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm. Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю. Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:
Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Схема подключения
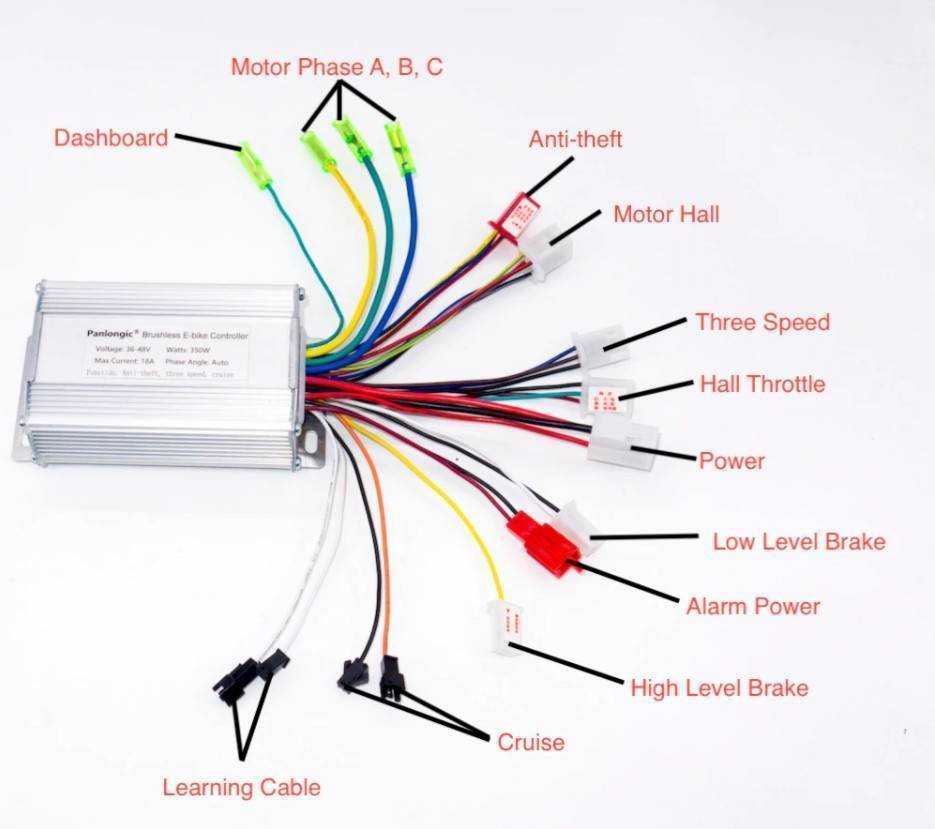
Общий принцип подключения выглядит так:
- Толстые провода черного и красного цвета – с соблюдением полярности подводятся к аккумуляторной батарее. При этом может появиться «искра», и даже возможно подгорание разъемов. Это нормально – так заряжаются конденсаторы на входе контроллера. Чтобы исключить искрение, достаточно ненадолго соединить контроллер и АКБ через резистор с сопротивлением в десятки Ом или воспользоваться лампочкой. Когда конденсаторы зарядятся, контроллер можно спокойно соединить с АКБ без посредников.
- Тройка толстых проводов разных цветов – обеспечивают подключение к фазным проводам 3-фазного электромотора.
- Связка из 5 тоненьких разноцветных проводов – идет к проводкам мотор-колеса, обеспечивают питание и передачу сигналов от датчиков положения.
- Отдельный красный проводок – «зажигание». При его замыкании на «плюс» АКБ происходит включение контроллера.
- Тройка тонких проводов (обычно – черный, красный и зеленый) – для подключения ручки газа.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
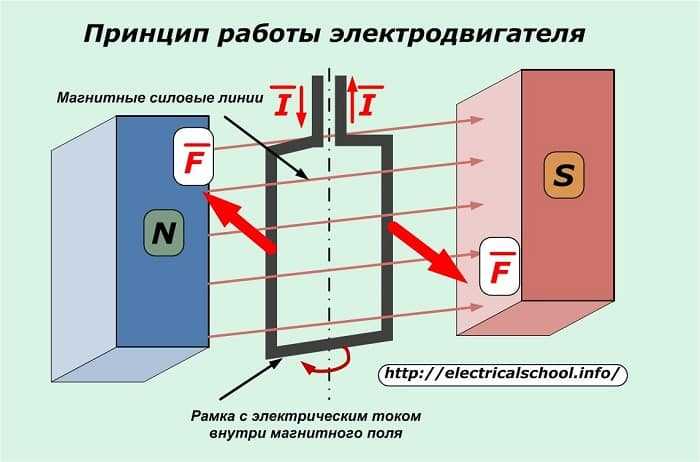
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
https://youtube.com/watch?v=uPdv7l9zx2c
https://youtube.com/watch?v=AEMPbjRkNfY
https://youtube.com/watch?v=unJFzgfH8zI
Как выбрать контроллер для электровелосипеда?
При выборе контроллера для электровелосипеда или другого транспорта на электротяге нужно оценить рабочие характеристики устройства. Ключевые параметры обычно указаны в маркировке. По ней можно узнать:
- рабочее напряжение батареи и мощность мотора (номинал), для применения с которыми предназначено устройство;
- предельный ток АКБ;
- минимум напряжения АКБ, когда происходит отключение контроллера;
- подходящее расположение датчиков Холла в электромоторе – в электрических градусах по отношению друг к другу.
Для расчета предельной мощности контроллера находим произведение допустимых величин напряжения и силы тока. Диапазон мощности у таких приборов широкий. Для велосипедов на электротяге обычно используются модели с номиналом мощности от 350 до 2000 Вт. Для электрических скутеров – от 1000 до 4000 Вт. Для электромотоциклов – от 5000 до 10 000 Вт. Для электромобилей – от 10 000 до 50 000 Вт и более.
На тумблере с автоматическим отключением
Предыдущая схема проста и удобна в управлении и ее, к примеру, можно использовать для управления моторами стеклоподъемников в автомобиле. Но для этого конструкцию придется немного доработать. Ведь управляя стеклоподъемником вручную, сложно определить, что стекло уже полностью открылось/закрылось и пора останавливать мотор. Взглянем на схему ниже.
Перед нами все та же конструкция с тумблером, но она дополнена двумя диодами и двумя концевыми выключателями. Предположим, наш мотор управляет приводом стеклоподъемника автомобиля. Стекло полуоткрыто, концевые выключатели S2 и S1, расположенные в верхней и нижней части окна, замкнуты, диоды D1 и D2 закорочены.
Переводим флажок S1 в одно из положений. К примеру, в верхнее по схеме. На мотор M1 начинает поступать напряжение – «плюс» на верхний вывод, «минус» на нижний. Стекло поднимается и, в конце концов, нажимает на толкатель концевика S2, заставляя его сработать. Контакты S2 размыкаются, и в работу включается диод D1. Поскольку он включен в обратном направлении, то тут же запирается, запрещая работу двигателя. Теперь сколько бы мы ни давили на флажок, мотор не запустится и не даст разнести стеклоподъемный механизм.
Переводим флажок S1 в нижнее по схеме положение. Теперь «плюс» подается на нижний по схеме вывод обмотки мотора и диод D1 оказывается включенным в прямом направлении. Он свободно пропускает ток, несмотря на то, что S2 разомкнут и разрешает работу электромотора, который опускает стекло. Как только стекло будет полностью опущено, сработает S2, останавливая М1. Ниже опустить его мы не сможем, но сможем поднять, поскольку опускаясь, стекло отпустило S2 и он снова замкнут.
Вот вроде и все. Схемы, конечно, исключительно просты и для тех, кто более-менее знаком с электроникой, не являются откровением. Но тех, кто только начал познавать электромир, эти схемы, возможно, чему-нибудь научат.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
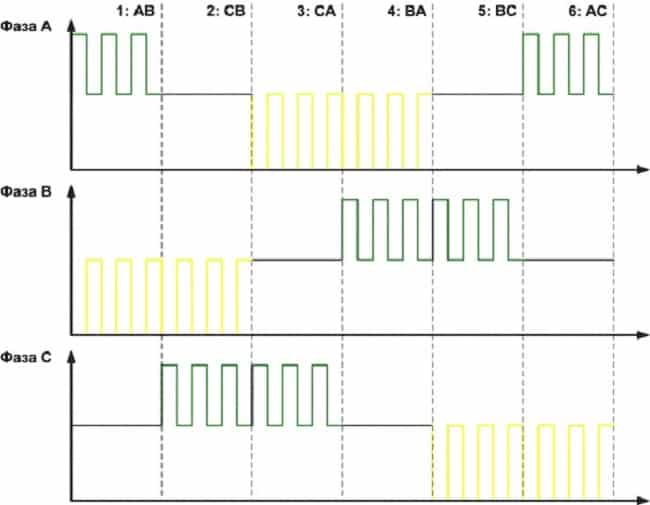
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
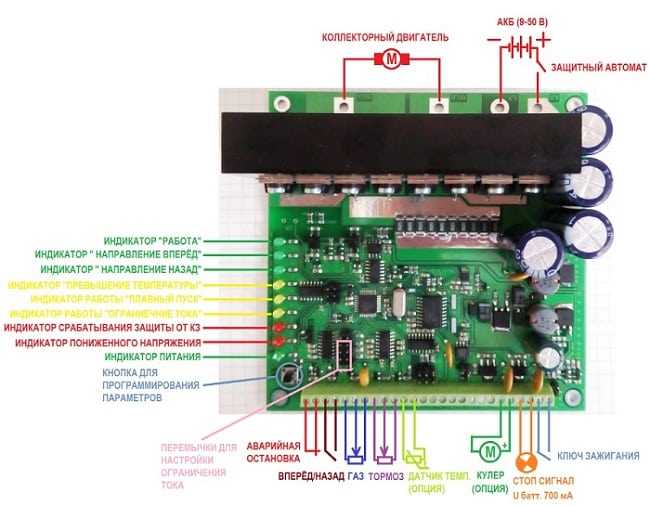
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
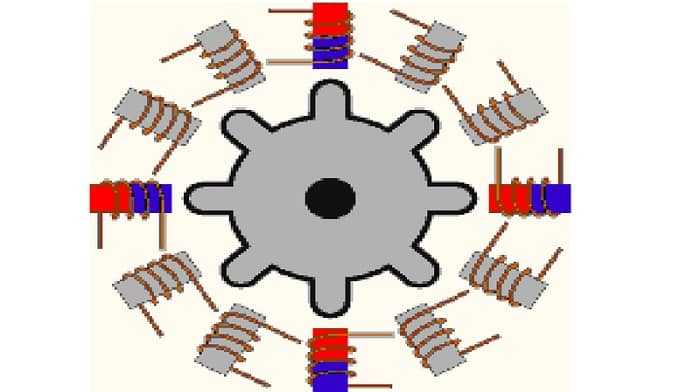
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
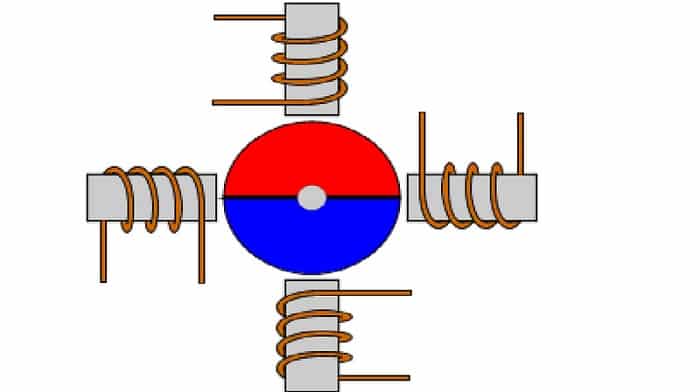
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
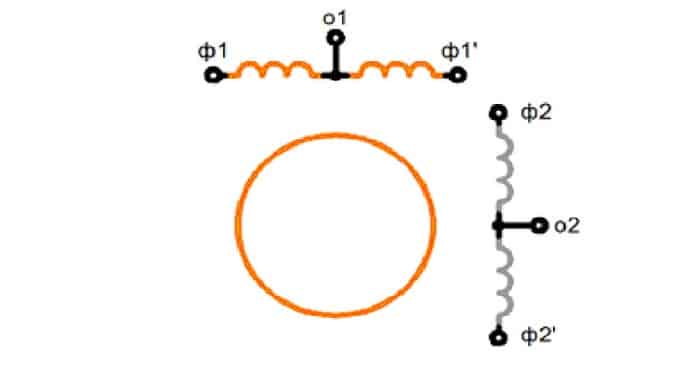
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
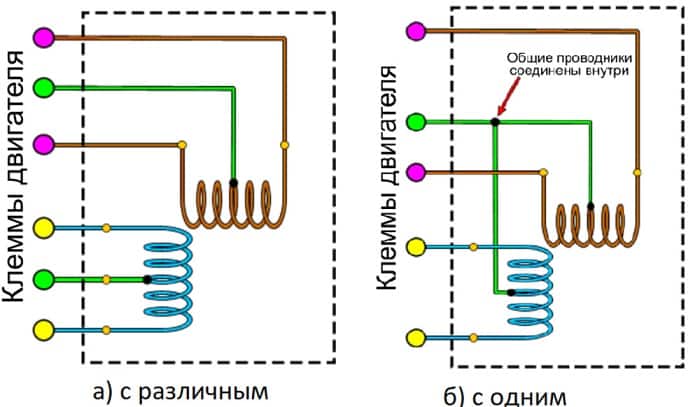
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
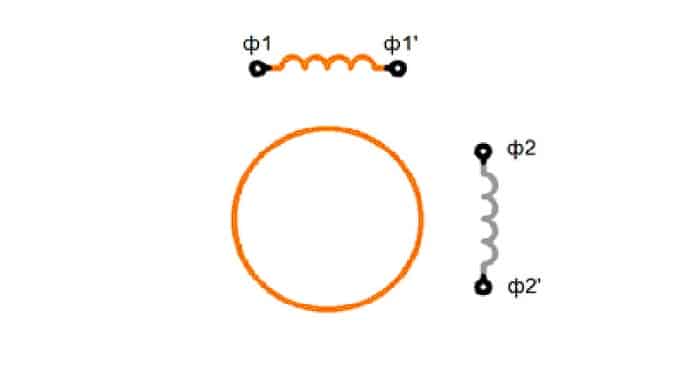
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Принцип работы
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
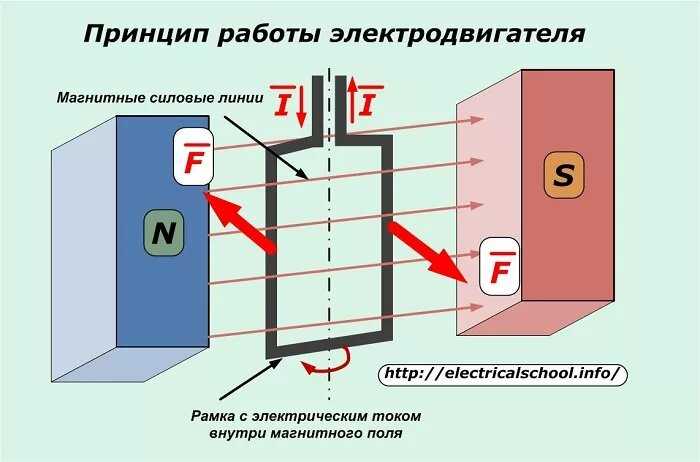
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Комплектация регулируемого привода
Частотный преобразователь формируется из трёх компонентов:
- Управляемый, либо неуправляемый выпрямитель, отвечающий за формирование напряжения ПТ (постоянного тока), поступающего от питания.
- Фильтр (в виде конденсатора), осуществляющий дополнительное сглаживание напряжения.
- Инвертор, моделирующий напряжение нужной частоты.
Самостоятельное подключение преобразователя
Перед тем, как приступать к подключению устройства следует воспользоваться обесточивающим автоматом, он обеспечит отключение всей системы в случае короткого замыкания на любой из фаз.
Существует две схемы соединения электродвигателя с частотным преобразователем:
- «Треугольник».
Схема актуальна, если требуется управлять однофазным приводом. Уровень мощности преобразователя в схеме при этом составляет до трёх киловатт, а мощность не теряется.
- «Звезда».
Способ, подходящий для подключения клемм трёхфазных частотников, питаемых промышленными трёхфазными сетями.
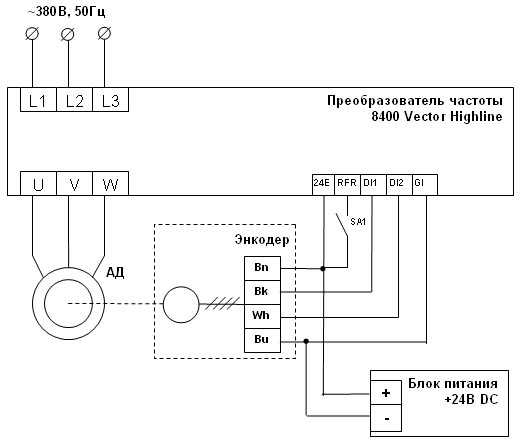
На рисунке схема подключения частотника 8400 Vector
Для ограничения пускового тока и снижения пускового момента при запуске электрического двигателя по мощности превосходящего 5 кВт, применяется переключение «звезда-треугольник».
Когда на статор пускается напряжение, то фигурирует подключение устройства по типу «звезда». Как только значение скорости двигателя начинает соответствовать номинальному, поступление питания осуществляется по схеме «треугольник». Но этот приём используется, только когда технические возможности позволяют подключаться по двум схемам.
В объединённой схеме «звезды» и «треугольника» наблюдаются резкие скачки токов. При переходе на второй тип подключения показания по вращательной скорости значительно уменьшаются. Для восстановления прежнего режима работы и частоты оборотов следует осуществить увеличение силы тока.
Наиболее активно применяются частотники в конструкции электрического двигателя с уровнем мощности 0,4 — 7,5 кВт.
Сборка преобразователя частот своими руками
Одновременно с промышленным производством частотных преобразователей, остаётся актуальной сборка подобного устройства своими руками. Особенно этому способствует относительная простота процесса. В результате работы инвертора производится преобразование одной фазы в три.
Применение в бытовых условиях электрических двигателей, имеющих в комплектации подобное устройство, не вызывает никаких дополнительных затруднений. Поэтому можно смело браться за дело.
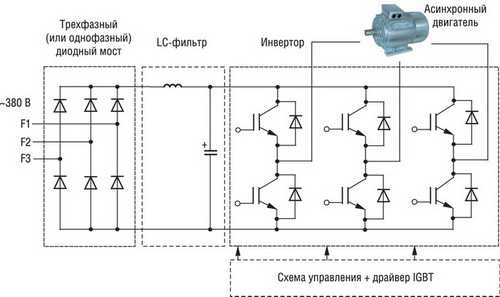
На рисунке структурная схема частотных преобразователей со звеном постоянного тока.
Схемы частотного преобразователя, используемые при сборке, состоят из выпрямительного блока, фильтрующих элементов (отвечающих за отсечение переменной составляющей тока и конструируемых из IGBT-транзисторов). По стоимости покупка отдельных компонентов преобразователя и выполнение сборки своими руками обходится дешевле, чем приобретение готового устройства.
Применять самосборные частотные преобразователи можно в электродвигателях имеющих мощность 0,1 — 0,75 кВт.
В то же время, современные заводские частотники имеют расширенную функциональность, усовершенствованные алгоритмы и улучшенный контроль безопасности рабочего процесса ввиду того, что при их производстве используются микроконтроллеры.
Сферы применения преобразователей:
- Машиностроение;
- Текстильная промышленность;
- Топливно-энергетические комплексы;
- Скважинные и канализационные насосы;
- Автоматизация управления технологическим процессом.
Стоимость электродвигателей находится в прямой зависимости от того, есть ли в его комплектации преобразователей.
Классификация частотников
По величине и типу электропитания различают инверторы нескольких видов:
- однофазные;
- трёхфазные;
- высоковольтные агрегаты.
Полупроводниковые частотные преобразователи производят преобразование тока или напряжения промышленной сети. Выходные параметры необходимого сигнала свободно регулируются элементами управления.
Исходный код программы
По умолчанию все необходимые заголовочные файлы подключаются автоматически самой средой ARDUINO IDE, она же конфигурирует сама и все регистры, необходимые для работы ШИМ, поэтому нам в программе уже не нужно заботиться об этих вещах. Все что нам нужно будет сделать – это определить на каком контакте мы будем использовать ШИМ.
То есть для использования ШИМ на нужном контакте нам необходимо сделать следующие вещи:
Сначала мы должны выбрать один из доступных 6 выходов (контактов) ШИМ. Потом необходимо установить этот контакт в режим на вывод данных.
После этого мы должны задействовать функции ШИМ на этом выходе используя функцию “analogWrite(pin, value)”. Здесь ‘pin’ обозначает номер контакта, на котором мы будем использовать ШИМ, в нашем случае это будет 3-й контакт.
Value в этой функции представляет собой цикл занятости (коэффициент заполнения) ШИМ, оно может принимать значения от 0 (всегда выключено) до 255 (всегда включено). Мы будем увеличивать и уменьшать это значение с помощью кнопок, присутствующих на схеме.
Плата Arduino UNO имеет максимальное разрешение (разрешающую способность) ШИМ, равную 8, что означает что value в функции analogWrite(pin, value) может принимать значения от 0 до 255. Но если в этом есть необходимость, мы можем уменьшать разрешение ШИМ используя функцию “analogWriteResolution()”, в скобках которой мы можем записать число в диапазоне 4-8, которое и будет определять разрешающую способность ШИМ платы Arduino UNO.
Переключатель на схеме служит для изменения направления вращения двигателя.
А теперь непосредственно сам код программы с комментариями.
Arduino
volatile int i=0; // инициализируем переменную целого типа для увеличения и уменьшения коэффициента заполнения ШИМ
void setup()
{
pinMode(3, OUTPUT); // устанавливаем pin3 на вывод данных
pinMode(0, INPUT); // устанавливаем pin0 на ввод данных
pinMode(1, INPUT); // устанавливаем pin1 на ввод данных
}
void loop()
{
analogWrite(3, i); // analogWrite values from 0 to 255
if (digitalRead(0)==LOW)
{
if (i<255) //если первая кнопка нажата (подключенная к pin0) и коэффициент заполнения ШИМ (i) меньше чем 255
{
i++;
delay(30);
}
}
if (digitalRead(1)==LOW)
{
if (i>0) // если вторая кнопка нажата (подключенная к pin1) и коэффициент заполнения ШИМ (i) больше 0
{
i—;
delay(30);
}
}
}
|
1 |
volatileinti=;// инициализируем переменную целого типа для увеличения и уменьшения коэффициента заполнения ШИМ voidsetup() { pinMode(3,OUTPUT);// устанавливаем pin3 на вывод данных pinMode(,INPUT);// устанавливаем pin0 на ввод данных pinMode(1,INPUT);// устанавливаем pin1 на ввод данных } voidloop() { analogWrite(3,i);// analogWrite values from 0 to 255 if(digitalRead()==LOW) { if(i<255)//если первая кнопка нажата (подключенная к pin0) и коэффициент заполнения ШИМ (i) меньше чем 255 { i++; delay(30); } } if(digitalRead(1)==LOW) { if(i>)// если вторая кнопка нажата (подключенная к pin1) и коэффициент заполнения ШИМ (i) больше 0 { i—; delay(30); } } } |
Выполняемые функции
Именно контроллер формирует в обмотке статора мотор-колеса вращающееся магнитное поле и получает ответные сигналы о позиции ротора. Сигналы поступают от датчиков Холла, а при управлении моторами без датчиков позиция роторов определяется по противо-ЭДС.
К тому же, контроллер управляет электродвигателем:
- позволяет менять скорость движения – при смене положения ручки газа меняется число импульсов напряжения, подаваемых за секунду на обмотки, и вращение колеса ускоряется или замедляется;
- обеспечивает рекуперацию энергии при торможении двигателем.
Контроллер выступает в роли понижающего преобразователя, поэтому проходящий по обмоткам мотора фазный ток может быть гораздо выше батарейного тока, поступающего от АКБ к контроллеру. Именно от него зависит мощность, поступающая на двигатель. Например, при использовании мотор-колеса номинальной мощностью 1000 Вт можно кратковременно получать значения до 2000–2500 Вт. Главное – использовать подходящий контроллер и постоянно контролировать температуру, чтобы не допустить перегрева двигателя.
Реверс двигателя постоянного тока схемы.
В статье «Регуляторы оборотов электродвигателей » речь шла о регулировке оборотов коллекторных двигателей электроинструментов. Нередко возникает и другая задача: реверс двигателя постоянного тока, т.е. требуется обеспечить его вращение в одну и другую стороны. Это может понадобиться, например, для привода ворот в гараже или коттедже, в различных моделях и пр. Проще всего такая задача с реверсом решается с помощью мостовой схемы, которая в общем виде представлена на рис.1 . Схема реверса состоит из четырех ключей, двигателя и источника питания. Когда все ключи разомкнуты ( рис.1а ), ток через двигатель не течет. При коммутации первого и четвертого ключа ток через двигатель Iд течет слева направо ( рис.1б ), и двигатель вращается в одном направлении. А при коммутации второго и третьего ключей — течет справа налево ( рис.1в ), и двигатель вращается в обратном направлении. Понятно, что руками коммутировать для реверса четыре переключателя неудобно, поэтому вместо ключей используем транзисторы ( рис.2 ). Транзисторы могут быть разной проводимости, полевыми или биполярными. Работают они в ключевом режиме. Обратно включенные диоды VD1. VD4 защищают транзисторы от выхода из строя, так как в момент выключения электродвигателя возникает достаточно большая ЭДС самоиндукции. Силовая часть устройства реверса на биполярных транзисторах приведена на рис.3 . Она состоит из четырех силовых и двух управляющих транзисторов; резисторов, ограничивающих базовые токи; шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание моста происходит от блока питания, подающего постоянное напряжение +50 В относительно земли. В cостоянии покоя на оба канала (А и Б) подается 0 В. Все транзисторы закрыты, на концах обмоток потенциал 0 В. Вал двигателя не вращается. Для вращения двигателя в одну сторону на канал А подается постоянное напряжение +5 В или ШИМ-сигнал, на канал Б — 0 В. Открывается оптрон VU1, следом управляющий VТ5; при этом VТ6 закрыт. Через резистор R2 протекает ток, открывающий силовые VТ1 и VТ4, а VТ2 и VТЗ закрыты. Таким образом, на конце обмотки Я1 потенциал составляет +50 В, на конце обмотки Я2 — 0 В. Вал двигателя вращается (например, по часовой стрелке). Чтобы включить реверс двигателя, на канал Б подается напряжение +5 В (ШИМ-сигнал), на канал А — 0 В. Управляющий VТ6 открыт, VТ5 — закрыт. Через резистор R4 в цепи коллектора VТ6 протекает ток, открывающий VТ2 и VТ3, а VТ1 и VТ4 закрыты. На конце обмотки Я1 потенциал составляет 0 В, на конце обмотки Я2 — +50 В. Вал двигателя вращается против часовой стрелки. В случае подачи полoжительного напряжения на оба канала (А и Б) произойдет короткое замыкание, поэтому такой режим предотвращается управляющей частью устройства. Реверс двигателя постоянного тока можно выполнить и на МОП-транзисторах ( рис.4 ). На входе схемы реверса последовательно установлены два инвертора так, что выход одного одновременно является входом другого. При этом сигнал управления (высокий или низкий логический уровень) на входе DD1.1 инвертируется и подается на вход DD1.2. Выходы инверторов управляют полевыми транзисторами. При высоком уровне на входе, на выходе DD1.1 — низкий уровень, а на выходе DD1.2. — высокий. Благодаря этому VТ2 и VТЗ открыты и пропускают ток от отрицательного к положительному полюсу источника питания. Двигатель М1 вращается против часовой стрелки. Если на вход схемы реверса подать низкий уровень, на выходе DD1.1 появится высокий уровень и откроются VT1 и VТ4, замыкая другую диагональ моста. Теперь ток потечет в другую сторону, и двигатель изменит направление вращения. Для управления устройством для реверса необходим логический сигнал МОП-уровня (0/+12 В).
Устройство для реверса испытывалось с электродвигателем автомобильного вентилятора. Мощные МОП-транзисторы (для КП74ЗБ напряжение сток-затвор составляет 80 В. максимальный ток стока — 4,9 А) обеспечивают запас по мощности и по напряжению. Сопротивление открытого канала составляет 0,3.. .0,5 Ом. Для повышения эффективности VT1. . .VТ4 устанавливаются на теплоотводы. Напряжение питания зависит от типа применяемого электродвигателя М1. Если его напряжение питания превышает 15 В, следует предусмотреть в схеме дополнительный стабилизатор для питания микросхемы DD1. Вместо К561ЛА7 можно применить другую микросхему серии 561, если ее элементы обеспечивают инвертирование сигнала (К561ЛЕ5, К561ЛН2). Другая схема управления реверсом, построенная на мощных комплементарных полевых транзисторах, показана на рис.5 .





