Базовые отличия FPGA от CPU, GPU
Какие типы ускорителей доступны на сегодняшний день? Сегодня доступны: многоядерные процессоры (CPU) Xeon, GPU и FPGA, рассмотрим их ниже.
У каждого типа процессора, —универсального (CPU), графического (GPU) или FPGA, — есть свои преимущества, иначе бы их просто не стали производить. CPU обеспечивают хорошую производительность при высшей степени универсальности и применимости. Порядка 99% всех существующих программ написаны для исполнения под CPU. У графических процессоров GPU большее число ядер и векторная архитектура, высокая скорость обмена с памятью и ввода-вывода. FPGA обладают самой большой производительностью на Ватт потребляемой мощности за счет свойств аппаратуры, но требуют очень тщательного и трудоемкого программирования.
Ниже об этих отличиях чуть подробнее:
- Универсальные процессоры CPU — это по сути, рабочие лошадки IT-индустрии. Их можно использовать для самых разнообразных задач, но ввиду своей архитектуры CPU не столь эффективны для параллельных вычислений. В последние годы эта проблема частично решается за счет имплементации в чипе процессора множества ядер. Однако даже у самых производительных CPU число ядер пока измеряется немногими десятками.
- Графические процессоры (GPU) долгие годы работали только в нише отображения информации на экране. И лишь относительно недавно GPU стали применяться для задач высокопроизводительных вычислений, в том числе майнинга криптовалют. Работа с графикой как векторными задачами привела к такому развитию архитектуры GPU, которая стала приспособленной для целей параллельных вычислений. Как результат, современной архитектура графического процессора позволяет ускорить прогон векторизованных данных через свои конвейеры, которые в противном случае пришлось бы запускать через многие другие логические блоки в CPU с соответствующей потерей в производительности. Современные GPU содержат в чипе несколько тысяч процессорных ядер.
- FPGA, в отличие от универсального и графического процессоров, можно перепрограммировать в соответствии с особенностями решаемой на них вычислительной задачи. Получается синтез специализированного процессора под конкретную задачу. Другими важными отличиями FPGA является пониженное энергопотребление в расчете на единицу вычислительной мощности, а также архитектура с параллельным исполнением множества векторных операций одновременно — так называемая массивно-параллельная мелкозернистая архитектура. Число ядер в чипе FPGA может достигать одного миллиона и более.
FPGA-ускоритель, как правило, представляет собой аппаратуру в различном форм-факторе (VPX, Com-express, PCIe и т.д.), которая кроме самого чипа FPGA (или нескольких) содержит на плате память типа SRAM и DRAM, включая ультра-новые HBM (память DRAM с высокой пропускной способностью) и высокоскоростные интерфейсы ввода-вывода, такие как популярные 10/40/100 GE и PCI Express. FPGA-ускорители также выпускаются в форм-факторе SOM (система на модуле, одноплатный компьютер) для целей встраиваемых систем, что популярно в системах видеоаналитики или промышленных применениях.FPGA-ускоритель в форм-факторе SOM
Каждый чип FPGA содержит в себе массив до 5 млн логических элементов (массив перекодировки и триггеры), который и может быть перепрограммирован под разные функциональные задачи. Кроме того, есть аппаратные ресурсы — кэш-память, сигнальные процессоры, блоки цифровой обработки, блоки интерфейсов.
Шим регулятор оборотов двигателя
Двигатель подключен к полевому транзистору VT1, который управляется ШИМ мультивибратором, построенным на популярном таймере NE555. Из-за применения таймера NE555 схема регулирования оборотов получилась достаточно простой.
Как уже было сказано выше, шим регулятор оборотов двигателя выполнен с помощью простого генератора импульсов вырабатываемого нестабильным мультивибратором с частотой 50 Гц выполненного на таймере NE555. Сигналы с выхода мультивибратора обеспечивают смещение на затворе MOSFET транзистора.
Длительность положительного импульса можно регулировать переменным резистором R2. Чем больше ширина положительного импульса поступающего на затвор MOSFET транзистора, тем больше мощность поступает на двигатель постоянного тока. И наоборот чем уже ширина его, тем меньше мощности передается и как следствие понижаются обороты двигателя. Данная схема может работать от источника питания в 12 вольт.
Характеристики транзистора VT1 ( BUZ11):
- Тип транзистора: MOSFET
- Полярность: N
- Максимальная рассеиваемая мощность (Вт): 75
- Предельно допустимое напряжение сток-исток (В): 50
- Предельно допустимое напряжение затвор-исток (В): 20
- Максимально допустимый постоянный ток стока (А): 30
- Сопротивление сток-исток открытого транзистора (мОм) : 40
Емкостной датчик влажности почвы V1.2. Подключение к Ардуино Двунаправленный регулятор скорости двигателя постоянного тока
Схема и описание Генератор ШИМ сигнала на микроконтроллере с регулируемой скважностью Регулятор оборотов микровентилятора на LTC1695 Контроллер вентилятора с плавным изменением оборотов. Схема
13 комментариев
Здравствуйте друзья. Прошу помочь со схемой. Мне понравился на ютубе (простой эл. привод медогонки)Сергей Мищенко -он так и называется. Все детали купил, а как собрать микросхему не знаю. В электрике немного разбираюсь,а в электронике дуб.
Иваныч. Подруби эл. мотор к медогонке через диммер и будет тебе счастье.
Схема работает абы как Выдает максимум на выходе 3,5 вольт от источника питания в 12 вольт
Работает нормально.Стоит в блоке управления электродвигателем медогонки..
Может кто-то уже посмотрит? Схема явно не совпадает с распространенной стандартной схемой. По моему ошибка в подключении диодов и потенциометра.
Почему на всех схемах регуляторов в инете значения конденсаторов и резисторов отличаются.
От номиналов R2 и С1 зависит частота генерируемых таймером колебаний. R2 может быть от 25 до 1000 кОм. От его номинала зависит диапазон регулировки выходного напряжения. R1, если не ошибаюсь, наименьшего сопротивления, которое в эту схему можно поставить. От R3 зависит величина входного тока затвора транзистора. Такие небольшие различия в схемах не должны быть для Вас препятствием в выборе, на какой остановиться. Поэкспериментируйте с разными номиналами деталей, их немного. И Вы найдете то, что Вам нужно…
схема не рабочая. Спалил 555 й
Набросал схему в Proteus, все работает. Скриншоты добавил в статью. Проверьте правильность монтажа, возможно есть ошибки…
Может вылететь в двух случаях: 1. Мотор мощный, импульсы по плюсовому проводу бьют микросхемку. Надо развязать (7809, например); 2. Ёмкость затвора большая, надо увеличить резистор R3 до 100 Ом.
даже 100 ом может быть маловато лучше 120-140 ом Тогда схема полностью рабочая можно смд полевик воткнуть (если нагрузка меньше 0.4 ампер) 555 сгорел из-за неправильного подключения (перепутал ножки)
Собрал схему. Без транзистора и мотора. На выход подключил бюджетный осциллограф hantek 6022. Всё работает. Кручу подстроечник — меняется шим. Примерно как на картинках в статье.
Схема рабочая , только движок поёт на полностью убавленном реостате . увеличить R3 ?
Источник
Разработка аналоговых компонентов
Давайте не буду вас томить. Установите в виртуалку Ubuntu и следуйте следующим шагам։ . Я бы установил его в ~/openlane_exp/ ибо именно этот путь я использую в примере
Для того чтобы установить программы которыми мы будем пользоваться следуйте следующим шагам։ https://github.com/armleo/sky130_ubuntu_setup/blob/main/install_tools.sh
Также вам может быть интересен https://inst.eecs.berkeley.edu/~cs250/fa20/labs/lab1/
Нам нужны следующие программы
-
OpenLANE, который установит модели для симуляции и отдельные компоненты и примитивы в соответствующей папке. Почитайте документацию очень интересно. Бесплатный установщик skywater PDK + скрипты для использования разных программ для того чтобы в автоматическом режиме скомпилировать вашу цифровую схему. Кроме того образ докера с предустановленными ПО для компиляции.
-
Yosys. Гордость проектов с открытым исходным кодом. Автор։ Claire Wolf. Позволяет скомпилировать ваш Verilog в gate-level представление, которое описывает вашу цифровую схему в виде отдельных компонентов. Замена Design Compiler от Synopsys
-
Куча других ПО, которые в автоматическом режиме превращают ваш gate-level в GDS-II. Об этом будет в соответствующей главе
-
-
skywater-pdk. Открытый PDK skywater 130nm. Содержит также так называемые готовые цифровые компоненты, примитивные компоненты и библиотека ячеек ввода-вывода
-
ngspice, Открытый симулятор spice. На удивление неплохой, но я конечно же рекомендую коммерческие симуляторы например HSPICE от Synopsys.
-
xschem, открытая программа для рисования схем. Бесплатная замена CustomCompiler от Synopsys
-
klayout, для рисования и открытия GDS-II. Бесплатная замена CustomCompiler от Synopsys
-
Magic, программа которая может производить DRC, и не только. Вообще очень полезная штука. Бесплатная замена IC Validator от Synopsys
-
Netgen, программа которая может делать LVS проверку. Бесплатная замена IC Validator от Synopsys
-
OpenRAM. Компилятор элементов памяти. Замена Memory Compiler от Synopsys. К сожалению мы не можем им пользоваться ибо у нас нет файлов технологической настройки, который закрыты из-за NDA. Правда готовые блоки с синхронными входами и выходами можно найти здесь.
Давайте уже к практике. Учтите что вам нужно поменять много параметров, надеюсь разберетесь.
Команды сверху установят пример инвертера и запустит докер с проброской из моей домашней папки и проброской X11 для окон.
После открытия надо подключить технологические файлы.
Откройте Manage Technologies
Правый клик по списку технологий
-
Найдите файл /home/armleo/openlane_exp/openlane/pdks/sky130A/libs.tech/klayout/sky130A.lyt
-
Откройте настройки слоев
Выберите sky130A
Хотите увидеть инвертер?
Инвертер
Да выглядит уродливо, зато бесплатно ։D.
Давайте поймём что это за схема, как она работает и из чего состоит. Сверху синий слой это метал по которому подключается SOURCE и BULK ножки PMOS транзистора к VDD или позитивному напряжению. Снизу слой металла по которому идёт VGND или заземление, который подключается к ножке SOURCE и BULK NMOS транзистора.
Ножки GATE подключенные к друг другу и к вводному сигналлу A с использованием слоя полисиликона LI1.
Выход подключен к контакту Y с использованием слоя полисиликона LI1.
Инвертер работает следующим образом։
-
NMOS открыт, когда на входе высокое напряжение, а PMOS закрыт. Таким образом на выходе получается низкое напряжение. NMOS открыт, поэтому низкое напряжение подаётся на выход, но короткого замыкания не просиходит, посколько PMOS закрыт.
-
NMOS закрыт, когда на входе низкое напряжение, а PMOS открыт и VDD подключен к сигналу Y. NMOS закрыт, поэтому низкое напряжение не подаётся на выход, и короткого замыкания не происходит. Таким образом на выходе получается высокое напряжение.
Схема в разрезе։
Схема соответствующая инвертеру։
Здесь вы можете видеть, что у транзистора на самом деле 4 ноги։ DRAIN, SOURCE, GATE, BULK.
В следующей частях разберемся։
ODYSSEY-X86J4125 — Intel встречает Arduino и Raspberry Pi

Разъемы GPIO важны для производителей при подключении датчиков, управляющих сервоприводов, двигателей и т. д. Одноплатный компьютер ODYSSEY-X86J4105 от Seeed Studio, который теперь вытесняется ODYSSEY-X86J4125, сочетает в себе мощность процессора Intel Gemini Lake (Refresh) с возможностью работы в режиме реального времени микроконтроллера Microchip SAMD21 Cortex-M0 +, совместимого с Arduino. Помимо этого также доступен разъем Raspberry Pi для еще больших возможностей расширения.
Мы протестировали плату с Windows 10 Enterprise и Ubuntu 20.04, и все работало, как ожидалось, но вентилятор может быть немного шумным, а разъем Raspberry Pi поддерживался только в Ubuntu. Документацию можно найти в Wiki
Несмотря на то, что получить ODYSSEY-X86J4105 SBC должно быть сложно, поскольку процессор постепенно снимается с производства, новый ODYSSEY-X86J4125 SBC с более быстрым процессором и теми же функциями продается за 218 долларов без хранилища или за 269 долларов с флэш-памятью eMMC 128 ГБ и корпусом Re_Computer.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
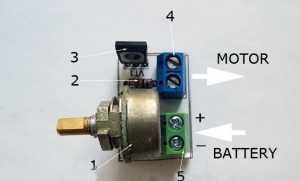
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
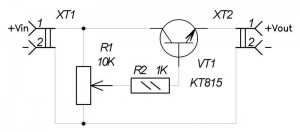
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
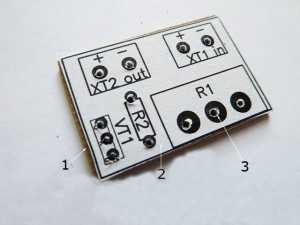
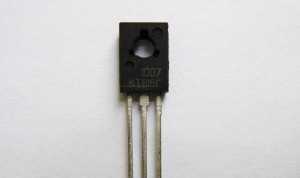
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.


Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).
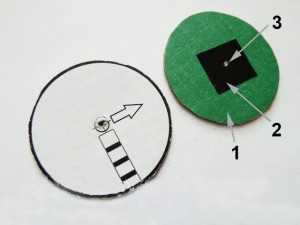
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Простая схема ШИМ-регулятора на таймере NE555
С микросхемой NE555 (аналог КР1006) знаком каждый радиолюбитель. Её универсальность позволяет конструировать самые разнообразные самоделки: от простого одновибратора импульсов с двумя элементами в обвязке до многокомпонентного модулятора. В данной статье будет рассмотрена схема включения таймера в режиме генератора прямоугольных импульсов с широтно-импульсной регулировкой.
Схема и принцип её работы
С развитием мощных светодиодов NE555 снова вышла на арену в роли регулятора яркости (диммера), напомнив о своих неоспоримых преимуществах. Устройства на её основе не требуют глубоких знаний электроники, собираются быстро и работают надёжно. Известно, что управлять яркостью светодиода можно двумя способами: аналоговым и импульсным. Первый способ предполагает изменение амплитудного значения постоянного тока через светодиод. Такой способ имеет один существенный недостаток — низкий КПД
Второй способ подразумевает изменение ширины импульсов (скважности) тока с частотой от 200 Гц до нескольких килогерц. На таких частотах мерцание светодиодов незаметно для человеческого глаза
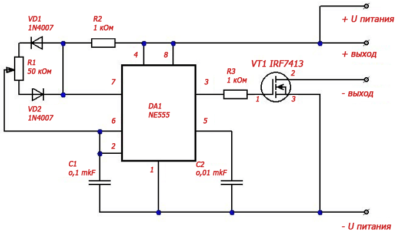
Схема ШИМ-регулятора с мощным выходным транзистором показана на рисунке. Она способна работать от 4,5 до 18В, что свидетельствует о возможности управления яркостью как одного мощного светодиода, так и целой светодиодной лентой. Диапазон регулировки яркости колеблется от 5 до 95%. Устройство представляет собой доработанную версию генератора прямоугольных импульсов. Частота этих импульсов зависит от ёмкости C1 и сопротивлений R1, R2 и определяется по формуле: f=1/(ln2*(R1+2*R2)*C1), Гц Принцип действия электронного регулятора яркости заключается в следующем. В момент подачи напряжения питания начинает заряжаться конденсатор по цепи: +Uпит – R2 – VD1 –R1 –C1 – -Uпит. Как только напряжение на нём достигнет уровня 2/3Uпит откроется внутренний транзистор таймера и начнется процесс разрядки. Разряд начинается с верхней обкладки C1 и далее по цепи: R1 – VD2 –7 вывод ИМС – -Uпит. Достигнув отметки 1/3Uпит транзистор таймера закроется и C1 вновь начнет набирать ёмкость. В дальнейшем процесс повторяется циклически, формируя на выводе 3 прямоугольные импульсы. Изменение сопротивления подстроечного резистора приводит к уменьшению (увеличению) времени импульса на выходе таймера (вывод 3), и как следствие, уменьшается (увеличивается) среднее значение выходного сигнала. Сформированная последовательность импульсов через токоограничивающий резистор R3 поступает на затвор VT1, который включен по схеме с общим истоком. Нагрузка в виде светодиодной ленты или последовательно включенных мощных светодиодов включается в разрыв цепи стока VT1. В данном случае установлен мощный MOSFET транзистор с максимальным током стока 13А. Это позволяет управлять свечением светодиодной ленты длиной в несколько метров. Но при этом транзистору может потребоваться теплоотвод. Блокирующий конденсатор C2 исключает влияние помех, которые могут возникать по цепи питания в моменты переключения таймера. Величина его ёмкости может быть любой в пределах 0,01-0,1 мкФ.
Плата и детали сборки регулятора яркости
Односторонняя печатная плата имеет размер 22х24 мм. Как видно из рисунка на ней нет ничего лишнего, что могло бы вызвать вопросы.
После сборки схема ШИМ-регулятора яркости не требует наладки, а печатная плата легка в изготовке своими руками. В плате, кроме подстроечного резистора, используются SMD элементы. DA1 – ИМС NE555; VT1 – полевой транзистор IRF7413; VD1,VD2 – 1N4007; R1 – 50 кОм, подстроечный; R2, R3 – 1 кОм; C1 – 0,1 мкФ; C2 – 0,01 мкФ.
Практические советы
Для себя я сделал немного другую обвязку таймера:
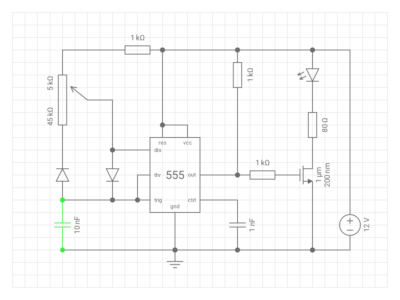
Ниже приведена схема из Proteus, а так же верхняя и нижняя сторона платы:
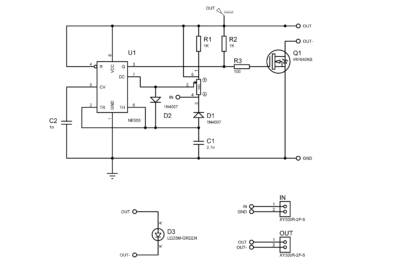
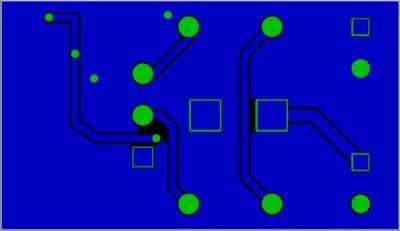
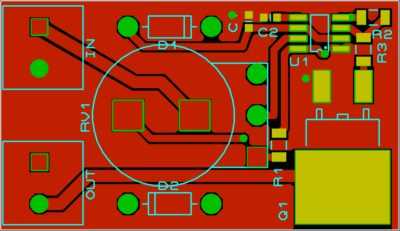
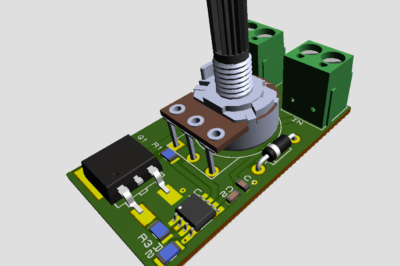
В схему я установил переменный резистор с выключателем, чтобы полностью обесточивать плату от внешнего питания. Добавил клемники для подключения питания и нагрузки. Ну и сама виртуальная модель устройства.
Этот архив содержит файлы в формате Gerber LED_PWM_ne555v2 — CADCAM
Источник
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание
Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Регулятор мощности SL-1800
Регулятор мощности SL-1800 можно встретить во многих недорогих китайских пылесосах.
Ремонт этого регулятора, не смотря на кажущуюся простоту схемотехники, невозможен – найти микросхему управления симистором практически невозможно. Силовая часть регулятора мощности SL-1800 выполнена на микросхеме регуляторе 501B-8P и симисторе BTA16-600B. Тут только два варианта событий: – купить плату регулятора в сборе, стоит она в районе 2000-2500 руб., что иногда составляет половину стоимости нового пылесоса. — собрать простейший регулятор мощности взамен оригинального регулятора. Такое творчество обойдется только запчастями в 200-250 руб.
Простейший регулятор мощности (коллекторный двигатель, лампа, нагреватель)
Важно. Перед заменой по любому из вариантов, убедиться, что щетки коллекторного двигателя изношены не более 50%, в противном случае есть шанс повторного ремонта. Тут следует добавить, стоимость работ по замене/диагностике составит еще 600 руб
, что может свести целесообразность ремонта к бесполезной трате времени. Однако если ремонт делается «для себя» и владение паяльником не вызывает благоговейный ужас, то можно взяться за восстановление работоспособности. Но все это теория, на практике все оказывается несколько проще, вот уже второй пылесос попадает в руки с одной неисправностью, возможно — это типовая неисправность
Тут следует добавить, стоимость работ по замене/диагностике составит еще 600 руб. , что может свести целесообразность ремонта к бесполезной трате времени. Однако если ремонт делается «для себя» и владение паяльником не вызывает благоговейный ужас, то можно взяться за восстановление работоспособности. Но все это теория, на практике все оказывается несколько проще, вот уже второй пылесос попадает в руки с одной неисправностью, возможно — это типовая неисправность
Неисправность со слов заказчика.
Согласно шильдика «пациента», мощность пылесоса не превышает 1800 Вт.
Пылесос Zanussi ZANS710 не включается или включается, но во время работы самопроизвольно выключается.
Первичная диагностика. Проверяем щетки коллекторного двигателя — щетки в идеальном состоянии, неисправна плата регулятора мощности.
Пылесос Zanussi ZANS710 в разобранном состоянии.
Ремонт. Так как подобная неисправность уже встречалась на другом пылесосе, то первым делом проверяем электролитический конденсатор Е1(220мкФ*16В), который имеет тенденцию обламываться от вибрации под собственным весом. Этот случай не стал исключением, несмотря на полную исправность конденсатора Е1(220мкФ*16В), его все таки заменяем, работоспособность пылесоса восстановлена.
Источник
Схема регулятора с обратной связью
Обратная связь необходима для стабилизации оборотов электродвигателя, которые могут изменяться под воздействием нагрузки. Сделать это можно двумя способами:
- Установить таходатчик, измеряющий число оборотов. Такой вариант позволяет производить точную регулировку, но при этом увеличивается стоимость реализации решения.
- Отслеживать изменения напряжения на электромоторе и, в зависимости от этого, увеличивать или уменьшать «открытый» режим полупроводникового ключа.
Последний вариант значительно проще в реализации, но требует небольшой настройки под мощность используемой электромашины. Ниже приведена схема такого устройства.
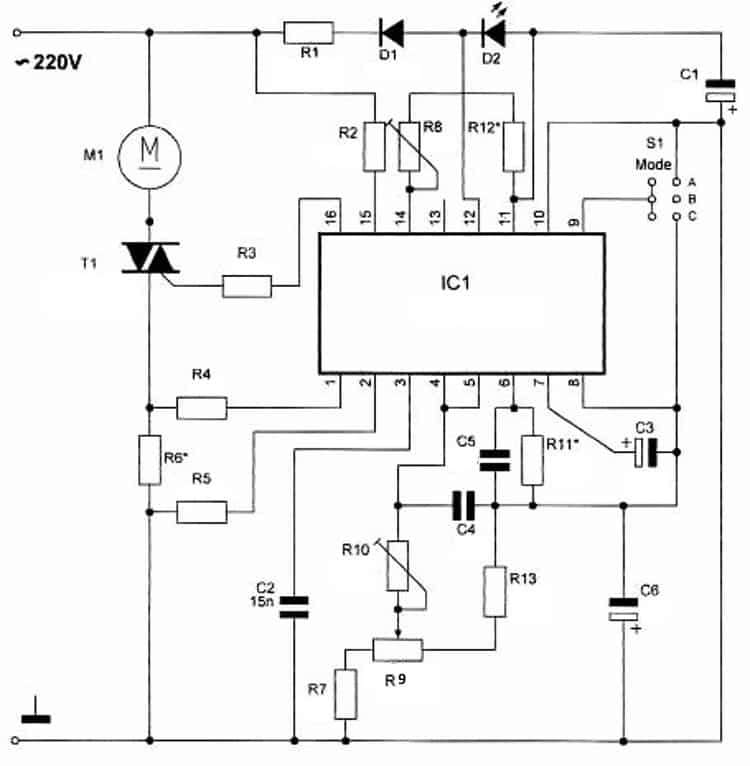
Регулятор мощности с обратной связью
Обозначения:
- Резисторы: R1 – 18 кОм (2 Вт); R2 — 330 кОм; R3 – 180 Ом; R4 и R5– 3,3 кОм; R6 – необходимо подбирать, как это делается будет описано ниже; R7 – 7,5 кОм; R8 – 220 кОм; R9 – 47 кОм; R10 — 100 кОм; R11 – 180 кОм; R12 – 100 кОм; R13 – 22 кОм.
- Конденсаторы: С1 — 22 мкФ х 50 В; С2 — 15 нФ; С3 – 4,7 мкФ х 50 В; С4 – 150 нФ; С5 — 100 нФ; С6 – 1 мкФ х 50 В..
- Диоды D1 – 1N4007; D2 – любой индикаторный светодиод на 20 мА.
- Симистор Т1 – BTA24-800.
- Микросхема – U2010B.
Данная схема обеспечивает плавный запуск электрической установки и обеспечивает ее защиту от перегрузки. Допускается три режима работы (выставляются переключателем S1):
- А – При перегрузке включается светодиод D2, сигнализирующий о перегрузке, после чего двигатель снижает обороты до минимальных. Для выхода из режима необходимо отключить и включить прибор.
- В — При перегрузке включается светодиод D2, мотор переводится на работу с минимальными оборотами. Для выхода из режима необходимо снять нагрузку с электродвигателя.
- С – Режим индикации перегрузки.
Настройка схемы сводится к подбору сопротивления R6, оно вычисляется, в зависимости от мощности, электромотора по следующей формуле: . Например, если нам необходимо управлять двигателем мощностью 1500 Вт, то расчет будет следующим: 0,25/ (1500 / 240) = 0,04 Ом.
Для изготовления данного сопротивления лучше всего использовать нихромовую проволоку диаметром 0,80 или1,0 мм. Ниже представлена таблица, позволяющая подобрать сопротивление R6 и R11, в зависимости от мощности двигателя.
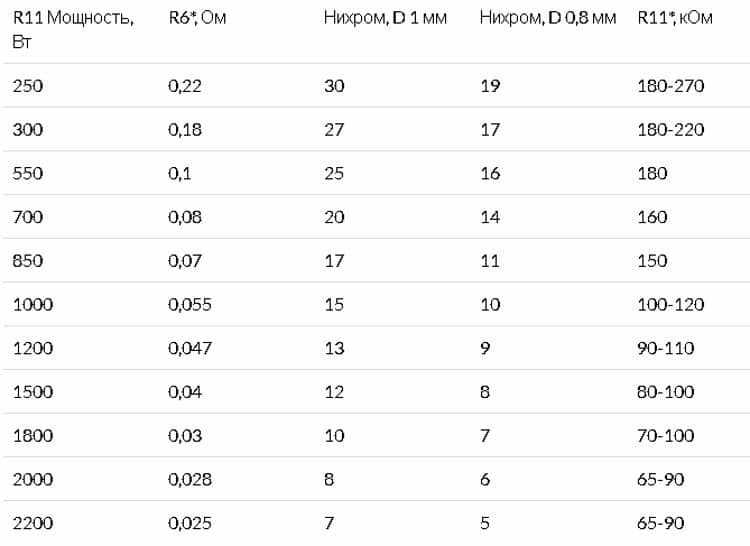
Таблица для подбора номиналов сопротивлений в зависимости от мощности двигателя
Приведенное устройство может эксплуатироваться в качестве регулятора оборотов двигателей электроинструментов, пылесосов и другого бытового оборудования.
Регулятор оборотов двигателя постоянного тока 12 вольт
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
https://youtube.com/watch?v=yISUWT58JUM
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
https://youtube.com/watch?v=U52dr8VvVz8
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
https://youtube.com/watch?v=QCwDoTrIY_U
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
https://youtube.com/watch?v=YUmOM3erSLE
Простой ШИМ регулятор на NE555
С аналоговым интегральным таймером SE555/NE555 (КР1006), выпускаемым компанией Signetics Corporation с далекого 1971 года прекрасно знакомо большинство советских и зарубежных радиолюбителей. Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.Предлагаемая Jericho Uno простенькая схемка автомобильного ШИМ-регулятора – не профессиональная, полностью отлаженная разработка, отличающаяся своей безопасностью и надежностью. Это всего лишь небольшой дешевый эксперимент, собранный на доступных бюджетных деталях и вполне удовлетворяющий минимальным требованиям. Поэтому его разработчик не берет на себя ответственности за все то, что может произойти с вашим оборудованием при эксплуатации смоделированной схемы.





