Момент двигателя постоянного тока
Если обмотку возбуждения и якорь двигателя подключить к сети постоянного тока напряжением U то, возникает электромагнитный вращающий момент Мэм. Полезный вращающий момент М на валу двигателя меньше электромагнитного на значение противодействующего момента, создаваемого в машине силами трения и равного моменту Мх в режиме х.х., т. е. М = Мэм—Мх.
Пусковой момент двигателя должен быть больше статического тормозного Мт в состоянии покоя ротора, иначе якорь двигателя не начнет вращаться. В установившемся режиме (при n = соnst) имеет место равновесие вращающего М и тормозного Мт моментов:
Из механики известно, что механическая мощность двигателя может быть выражена через вращающий момент и угловую скорость
Следовательно, полезный вращающий момент двигателя М (Н • м), выраженный через полезную мощность Р (кВт) и частоту вращения n (об/мин),
Обсудим некоторые важные вопросы пуска и работы двигателей постоянного тока. Из уравнения электрического состояния двигателя следует, что
В рабочем режиме ток якоря Iя ограничивается э. д. с. E, если n приблезительно равно nном. В момент пуска п = 0, э. д. с. Е = 0 и пусковой ток Iп = U/Rяв 10—30 раз больше номинального. Поэтому прямой пуск двигателя, т. е. непосредственное включение якоря на напряжение сети, недопустимо. Чтобы ограничить большой пусковой ток якоря, перед пуском последовательно с якорем включается пусковой реостат Rп с небольшим сопротивлением. В этом случае при Е = О
После пуска и разгона наступает установившийся режим работы двигателя, при котором тормозной момент на валу Мт будет уравновешиваться моментом, развиваемым двигателем Мэм, т. е. Мэм == Мт(при n = соnst.)
Электродвигатели постоянного тока могут восстанавливать нарушенный изменением тормозного момента установившийся режим работы, т. е. могут развивать вращающий момент М, равный новому значению тормозного момента Мт при соответственно новой частоте вращения n’.
Действительно, если тормозной момент нагрузки Мт окажется больше вращающего момента двигателя Мэм, то частота вращения якоря уменьшится. При постоянных напряжении U и потоке Ф это вызовет уменьшение э. д. с. Е якоря, увеличение тока якоря и вращающего момента до наступления равновесия, при котором Мэм = Мт и n’ n’. Таким образом, двигатели постоянного тока обладают свойством саморегулирования — могут развивать вращающий момент, равный тормозному.
Регулирование частоты
Частота вращения якоря двигателя постоянного тока определяется на основании уравнения электрического состояния U = Е + RяIяпосле подстановки в него э. д. с. Е = сФn:
Падение напряжения в якоре RяIя небольшое: при номинальной нагрузке оно не превышает 0,03 — 0,07 Uном.
Таким образом, частота вращения двигателя постоянного тока прямо пропорциональна приложенному напряжению сети и обратно пропорциональна магнитному потоку статора. Из уравнения (13) следует, что регулировать частоту вращения двигателя можно двумя способами: изменяя поток статора Ф или напряжение U подводимое к двигателю. Регулирование частоты вращения изменением магнитного поля машины осуществляется с помощью регулировочного реостата в цепи возбуждения двигателя. Изменение подводимого к двигателю напряжения производится регулированием напряжения источника.
Можно ввести дополнительный реостат в цепь якоря. В этом случае пусковой реостат заменяется пускорегулирующимRпр Такой реостат выполняет функции как пускового реостата, так и регулировочного. Уравнение (13) при этом имеет вид
Отсюда следует, что регулирование частоты вращения двигателя можно осуществить, изменяя напряжение сети, сопротивление пускорегулирующего реостата или поток статора.
Реверсирование двигателей. Из уравнения вращающего момента двигателя Мэм = kФIя вытекает, что реверсирование, т. е. изменение направления вращения якоря, может быть осуществлено изменением направления тока в обмотке возбуждения (потока Ф) или тока якоря.
Для реверсирования двигателя «на ходу» изменяют направление тока якоря (переключением якорных выводов), а обмотку возбуждения не переключают, так как она обладает большой индуктивностью и разрыв ее цепи с током недопустим. Реверсирование отключенного двигателя осуществляется и изменением направления тока в обмотке возбуждения (переключением ее выводов).
Источник
Что такое коллекторный двигатель и его особенности
Коллектором называют часть двигателя, контактирующую со щётками. Этот узел обеспечивает передачу электроэнергии в рабочую часть агрегата. Коллекторным называется двигатель, у которого хотя бы одна обмотка ротора соединена со щётками и коллектором. Коллекторные электродвигатели бывают:
- постоянного тока;
- переменного тока;
- универсальные.

Коллекторный двигатель может быть постоянного и переменного тока. Есть универсальные модели, которые могут работать от источника напряжения любого типа
Последние универсальные, работают как от постоянного, так и от переменного тока. Они сохраняют популярность, даже несмотря на то, что наличие щёток отрицательный момент, так как щётки стираются и искрят. За этим узлом требуется постоянное наблюдение, техническое обслуживание. К плюсам коллекторных двигателей относят возможность плавной регулировки скорости в широких пределах, невысокую стоимость.
Как и другие электромоторы, коллекторный состоит из статора и ротора (часто называют «якорь»). Его отличительной чертой является наличие на валу коллекторного узла, через который на машину передаётся электропитание. Устройство коллекторных моторов постоянного и переменного тока похожи, но имеют определённые отличия, потому рассмотрим подробнее их по отдельности.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
https://youtube.com/watch?v=uPdv7l9zx2c
https://youtube.com/watch?v=AEMPbjRkNfY
https://youtube.com/watch?v=unJFzgfH8zI
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин-1
Начальный пусковой момент – момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение – значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (), Вт
При этом
потери в электродвигатели обусловлены:
электрическими потерями – в виде тепла в результате нагрева проводников с током;
магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m – масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Принцип действия
Особенности функционирования МПТ зависит от того, в каком режиме она работает — генератора или двигателя. Далее подробно рассматриваются оба варианта.
Генератор
Принцип работы генератора постоянного тока основан на явлении электромагнитной индукции. Состоит оно в том, что при изменении магнитного потока, пересекающего проводник, в последнем наводится ЭДС.
Принцип действия генератора постоянного тока
Чтобы добиться изменения магнитного потока, меняют параметры поля либо двигают в постоянном поле проводник. По второму варианту и работает генератор постоянного тока: обмотка якоря приводится во вращение внешней механической силой.
Очевидно, что после поворота витков обмотки на 180 градусов ЭДС окажется направленной противоположно. Сохранить ток в подключенной к генератору цепи постоянным, то есть однонаправленным, помогает коллектор: в нужный момент он переподключает концы обмотки якоря к противоположным контактам цепи (щеткам). То есть в этой машине коллектор играет роль механического выпрямителя.
При наличии всего двух основных полюсов ток получится пульсирующим. Увеличение числа полюсов приводит к сглаживанию пульсаций.
Двигатель
Работа МПТ в режиме двигателя обусловлена возникновением так называемой амперовой силы. Она действует на помещенный в магнитное поле проводник при протекании по нему тока. Направление амперовой силы определяется по правилу левой руки.
Сила Ампера появляется благодаря следующему механизму:
- при протекании тока вокруг проводника возникает магнитное поле с силовыми линиями, концентрически окружающими проводник (круговое поле);
- вектор его индукции по одну сторону от проводника сонаправлен с вектором индукции первичного магнитного поля, в которое проводник помещен. С этой стороны первичное поле усиливается;
- по другую сторону вектор наведенного электротоком поля направлен противоположно вектору индукции первичного поля, соответственно, здесь оно гасится;
- разница в индукции поля по обе стороны проводника активирует к возникновению данной силы. Определяется она по формуле: F = B * I * L, где: B — магнитная индукция первичного поля, I — сила тока в проводнике, L — длина проводника.
Как и в случае с генератором, после поворота витка обмотки якоря в определенное положение, требуется переключение контактов для изменения в ней направления тока либо полярности индуктора. Поэтому в режиме двигателя коллектор также необходим.
У коллекторных двигателей есть преимущества:
- простота и широкий диапазон регулировки;
- жесткая механическая характеристика (вращающий момент остается стабильным).
Недостаток — низкая надежность коллектора и его сложность, негативно отражающаяся на стоимости двигателя.
Вот какими нежелательными явлениями сопровождается работа узла:

- искрение;
- засорение токопроводящей графитовой пылью (щетки выполнены из этого материала);
- появление помех в сети;
- при значительной нагрузке — кольцевое искрение («круговой огонь»), приводящее к выгоранию коллекторных пластин.
В целях борьбы с недостатками в некоторых современных двигателях постоянного тока (ДПТ) применены следующие решения:
- обмотки якоря и индуктора меняются местами: первую размещают на неподвижной части (статоре), вторую — на вращающейся (роторе). Скользящий контакт при этом остается, но из-за низкой нагрузки в обмотке возбуждения, он намного проще и надежнее коллекторно-щеточного;
- переключение между обмотками якоря, теперь расположенного в неподвижной части, осуществляется при помощи полупроводниковых ключей, срабатывающих по сигналу датчика положения ротора. То есть механический переключатель (коллектор) заменен электронным.
Такие двигатели называют бесколлекторными, за рубежом — BLDC-двигателями.
Конструкция щеточного аппарата
Для отвода тока от вращающегося коллектора и подвода к нему тока применяется щеточный аппарат, который состоит из щеток, щеткодержателей, щеточных пальцев, щеточной траверсы и токособирающих шин.
Одна из типичных конструкций щеткодержателя показана на рисунке 5. Щеткодержатели укрепляются на щеточных пальцах. На каждом щеточном пальце обычно помещают несколько или целый ряд щеткодержателей со щетками, которые работают параллельно. Щеточные пальцы, число которых обычно равно числу главных полюсов, крепятся к щеточной траверсе (рисунок 7)
Рисунок 6. Щеткодержатель со щеткой 1 – обойма щеткодержателя; 2 – щетка; 3 – нажимная пружина; 4 – токоведущий кабель; 5 – колодки для крепления к пальцу
Рисунок 7. Крепление щеточного пальца к траверсе 1 – палец; 2 – траверса; 3 – изоляция; 4 – токособирательная шина
и электрически изолируются от нее. Траверса крепится к неподвижной части машины: в машинах малой и средней мощности – к втулке подшипникового щита, а в крупных машинах – к станине. Обычно предусматривается возможность поворота траверсы для установки щеток в правильное положение. Полярности щеточных пальцев чередуются, и все пальцы одной полярности соединяются между собой сборными шинами. Шины с помощью отводов соединяются с выводными зажимами или с другими обмотками машины.
Коллектор и щеточный аппарат являются весьма ответственными узлами машины, от конструкции и качества изготовления которых в большой степени зависит бесперебойная работа машины и надежность электрического контакта между коллектором и щетками.
Способы возбуждения машин постоянного тока и их классификация
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения. Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено. Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
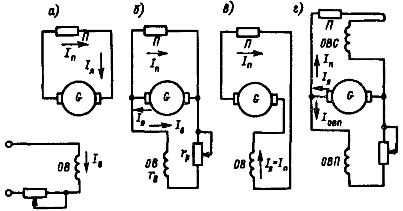
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Источник
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Таблица классификации электронных двигателей:
Главные критерии выбора
Первое, что должен сделать пользователь, это объективно оценить варианты, предлагаемые на рынке регулируемых приводов, технически соответствующие требованиям прикладной задачи/процесса. Главными критериями этой оценки должны быть: 1. Совокупная стоимость закупки регулируемого привода и требуемого дополнительного оборудования 2. Текущие эксплуатационные расходы:
- обслуживание;
- производственные издержки, КПД, и т.д;
- требуемая площадь размещения.
3. Технологические и инновационные аспекты:
- динамический отклик, время разгона; 4-х квадрантные операции; аварийный стоп, и т.д.
- массо-габаритные характеристики.
4. Эксплуатационная надежность, пригодность приводов:
- соответствие международным требованиям и стандартам IEC, ГОСТ Р, EN, CE-EMC; CSA, UL, и т.д.;
- условия окружающей среды; степень защиты корпуса; ремонт «по-месту»
5. Воздействие на внешнюю среду:
- искажение сетевого напряжения
- ЭМС
6. Требуемое пространство для преобразователя и двигателя 7. Отвод тепла
Разновидности электромоторов
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
- синхронные;
- асинхронные;
- коллекторные,
на постоянном напряжении и токе работают:
- коллекторные;
- униполярные;
- шаговые.
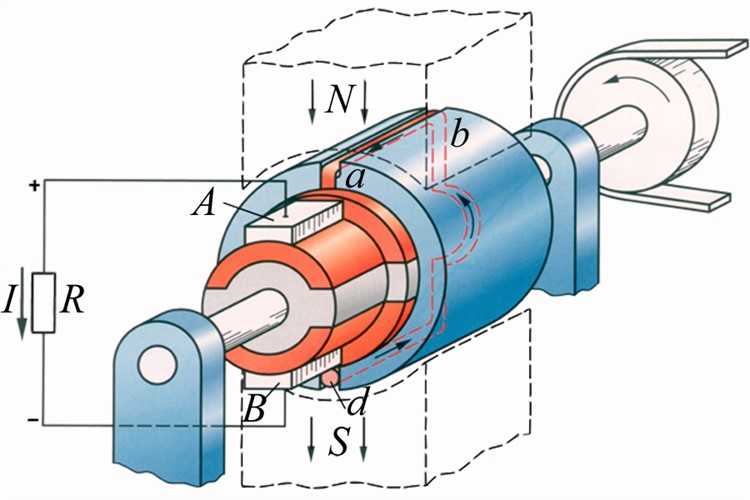
Преобразование энергии
На рисунке 5 показаны направления действия механических и электрических величин в якоре генератора и двигателя постоянного тока.
Рисунок 5. Направление э. д. с., тока и моментов в генераторе (а) и двигателе (б) постоянного тока
Согласно первому закону Ньютона в применении к вращающемуся телу, действующие на это тело движущие и тормозные вращающие моменты уравновешивают друг друга. Поэтому в генераторе при установившемся режиме работы электромагнитный момент
| Mэм = Mв — Mтр — Mс, | (7а) |
где Mв – момент на валу генератора, развиваемый первичным двигателем, Mтр – момент сил трения в подшипниках, о воздух и на коллекторе электрической машины, Mс – тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. Эти потери мощности появляются в результате вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом электромагнитные силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения.
В двигателе при установившемся режиме работы
| Mэм = Mв + Mтр + Mс, | (7б) |
где Mв – тормозной момент на валу двигателя, развиваемый рабочей машиной (станок, насос и т. п.).
В генераторе Mэм является тормозным, а в двигателе – вращающим моментом, причем в обоих случаях Mв и Mэм противоположны по направлению.
Развиваемая электромагнитным моментом Mэм мощность Pэм называется электромагнитной мощностью и равна
| Pэм = Pэм × Ω, | (8) |
где
| Ω = 2 × π × n, | (9) |
представляет собой угловую скорость вращения.
Подставим в выражение (8) значение Mэм и Ω из равенств (5) и (9) и учтем, что линейная скорость на окружности якоря
Тогда получим
| Pэм = 2 × B × l × Dа × Iа × π × n = 2 × B × l × v × Iа |
или на основании выражения (1)
| Pэм = Eа × Iа. | (10) |
В обмотке якоря под действием э. д. с. Eа и тока Iа развивается внутренняя электрическая мощность якоря
| Pа= Eа × Iа. | (11) |
Согласно равенствам (10) и (11), Pэм = Pа, т. е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе.
Умножим соотношения (3) и (6) на Iа. Тогда для генератора будем иметь
| Uа × Iа = Eа × Iа – Iа2 × rа | (12) |
и для двигателя
| Uа × Iа = Eа × Iа + Iа2 × rа. | (13) |
Левые части этих выражений представляют собой электрические мощности на зажимах якоря, первые члены правых частей – электромагнитную мощность якоря и последние члены – электрические потери мощности в якоре.
Приведенные соотношения действительны и при более сложной обмотке якоря, так как э. д. с. и моменты отдельных проводников складываются. Эти соотношения являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Согласно им механическая мощность, развиваемая на валу генератора первичным двигателем, за вычетом механических и магнитных потерь, превращается в электрическую мощность в обмотке якоря, а электрическая мощность за вычетом потерь в этой обмотке выдается во внешнюю цепь. В двигателе электрическая мощность, подводимая к якорю из внешней цепи, частично расходуется на потери в обмотке якоря, а остальная часть этой мощности превращается в мощность электромагнитного поля и последняя – в механическую мощность, которая за вычетом потерь на трение и потерь в стали якоря передается рабочей машине.
Установленные выше применимо к машине постоянного тока общие закономерности превращения энергии в равной степени относятся также к машинам переменного тока.





